 Основная цель данной серии статей – помочь вам создать автономный мобильный робот. Робот оснащается операционной системой ROS, а все операции будут смоделированы с помощью программы-симулятора, называющейся Gazebo. Также в этих статьях вы найдете теоретический расчет, проект робота, чертежи деталей, внутреннее программное обеспечение и программное обеспечение высокого уровня, интегрированное с ROS.
Основная цель данной серии статей – помочь вам создать автономный мобильный робот. Робот оснащается операционной системой ROS, а все операции будут смоделированы с помощью программы-симулятора, называющейся Gazebo. Также в этих статьях вы найдете теоретический расчет, проект робота, чертежи деталей, внутреннее программное обеспечение и программное обеспечение высокого уровня, интегрированное с ROS.
Данная статья начинается с основных понятий о ROS, таких как: установка, написание основных программ с использованием ROS и Python. Далее идет знакомство с основами работы в Gazebo. Эта статья станет базовой в вашем проекте автономного робота. Если вы уже знакомы с основами ROS и эта операционная система у вас установлена, то эту статью можете пропустить и перейти к следующей статье «Основные понятия роботов с дифференциальным приводом«. Однако вы всегда можете вернуться к этой статье, чтобы освежить память об основах ROS.
В этой статье будут рассмотрены следующие темы:
- введение в ROS;
- установка Ros Kinetic на Ubuntu 16.04.3;
- знакомство, установка и тестирование Gazebo.
Начинаем программировать робота с помощью Python и операционной системы робота (ROS).
Введение в ROS
ROS – это программная платформа, назначение которой – написание программного обеспечения робота. Основная цель ROS – создание и использование робототехнического программного обеспечения по всему миру. ROS состоит из набора инструментов, библиотек и программных пакетов, упрощающих задачу создания программного обеспечения робота.
Официальное определение ROS
ROS – это метаоперационная система с открытым исходным кодом, разработанная для робота. Она предоставляет все необходимое для данной операционной системы службы, включая аппаратные средства визуализации, низкоуровневое управление устройством, реализацию функциональности для общего использования, передачу сообщений между процессами и пакетами управления. Она также предоставляет инструменты и библиотеки для получения, построения, написания и выполнения кода на нескольких компьютерах. ROS похожа в некоторых отношениях на «фреймворки робота», такие как Player, YARP, Orocos, CARMEN, Orca, MOOS и Microsoft Robotics Studio.
Основные функции, которые обеспечивает ROS:
- интерфейс передачи сообщений. Это базовая функция ROS, позволяющая организовать межпроцессное взаимодействие. Используя эту функцию, ROS может обмениваться данными между связанными системами.
- аппаратная универсальность. ROS обладает некоторой степенью универсальности, что позволяет разработчикам создавать роботизированные приложения. Они могут быть использованы с любым устройством. Разработчики должны лишь позаботиться о надлежащем аппаратном обеспечении робота;
- управление пакетами. Узлы ROS организованы в пакеты и называются пакетами ROS. Они состоят из исходных кодов, конфигурационных файлов типа «build» («строить») и т. д. Мы сначала разрабатываем пакет, собираем его и устанавливаем. В ROS предусмотрена система сборки, которая помогает создавать эти пакеты. Управление пакетами делает развитие ROS более упорядоченным и организованным;
- дополнительные библиотеки. В структуру ROS встроено несколько дополнительных библиотек, разработанных сторонними организациями, таких как Open-CV, PCL, OpenNI и др. Данные библиотеки помогают сделать ROS универсальной метаоперационной системой;
- управление низкоуровневыми устройствами. Во всех роботах присутствуют устройства низкого уровня, например устройства ввода/вывода, контроллеры последовательных портов и др. Управление такими устройствами тоже осуществляется с помощью ROS;
- распределенные вычисления. Объем вычислений, которые потребуются для обработки потока данных от многочисленных датчиков, очень высок. Используя ROS, мы можем легко распределить их в группе вычислительных узлов. Это позволит равномерно распределить вычислительные мощности, и данные будут обрабатываться быстрее, чем на одиночном компьютере;
- многократное использование кода. Основной целью ROS является многократное использование кода, способствующее развитию научноисследовательского сообщества по всему миру. Исполняемые файлы ROS называются узлами. Они сгруппированы в единый объект, называемый пакетом ROS. Группа пакетов – стек. Стеки могут быть разделены и распределены;
- независимость от языка. В ROS можно программировать с помощью таких популярных языков, как Python, C++ и Lisp. Узлы могут быть написаны на любом из этих языков, и обмен данными между такими узлами через ROS не вызовет никаких проблем;
- простота тестирования. ROS имеет встроенный модуль интеграционного тестирования, называющийся rostest и предназначенный для тестирования пакетов ROS;
- масштабирование. ROS после некоторой модификации может выполнять сложные вычисления в роботах;
- свободный и открытый исходный код. Исходный код ROS открыт и абсолютно свободен в использовании. Основная часть ROS лицензирована BSD и может быть повторно использована в коммерческих и закрытых продуктах источника.
ROS – комбинация из потока данных (передачи сообщений), инструментов, возможностей и экосистемы. В ROS встроены мощные инструменты для ее отладки и визуализации. Робот, оснащенный ROS, обладает такими возможностями, как навигация, определение местонахождения, составление карты, манипуляции и т. д. Они помогают создать мощные приложения для роботов.
Приведенное ниже изображение показывает уравнение ROS:

Концепции ROS
ROS состоит из трех основных уровней, таких как:
1) файловая система ROS;
2) вычислительный граф ROS;
3) сообщество ROS.
Файловая система ROS
Основная задача файловой системы ROS – организация файлов на диске.
Основные термины файловой системы ROS:
- пакеты. Пакеты ROS являются основной единицей в рамках программного фреймворка ROS. Пакет ROS может содержать исполняемые файлы, ROS-библиотеки, принадлежащие программному обеспечению сторонних производителей, конфигурационные файлы и т.д. Пакеты ROS можно использовать повторно и совместно;
- описания пакета. В описании пакетов (пакет .XML-файла) вы найдете всю детализацию пакетов, включая имя, описание, лицензию и зависимости;
- типы сообщений (msg). Все сообщения хранятся в отдельной папке, в файлах с расширением .msg. ROS-сообщения – это структурированные данные, проходящие через ROS;
- типы служб (SRV). Описания служб хранятся в папке SRV с расширением .srv. SRV-файлы определяют запрос и ответ для структуры данных в сервисе ROS.
Вычислительный граф ROS
Вычислительный граф ROS – это одноранговая cеть систем ROS, назначение которой – обработка всех данных. Основными понятиями вычислительной графики ROS являются узлы, Мастер ROS, сервер параметров, сообщения и службы.
- Узлы – это вычислительные процессы в ROS. Каждый узел выполняет обработку определенных данных. Например, один узел обрабатывает данные с лазерного сканера, другой публикует эти данные и т.д. Узел ROS создается с помощью клиентской библиотеки ROS (например, roscpp и rospy). Более подробно мы познакомимся с этими библиотеками во время создания образца узла.
- Мастер ROS. Мастер ROS действует как служба имен в графе вычислений ROS. Он хранит темы и регистрационную информацию служб для узлов ROS. Узлы общаются с Мастером, сообщая свои регистрационные данные. Эти узлы, общаясь с мастером, получают информацию о других зарегистрированных узлах и соответственно устанавливают с ними
соединения. Мастер также выполняет обратный вызов этих узлов при изменении регистрационной информации, позволяющей узлам динамически создать соединения при запуске новых узлов. Узлы подключаются непосредственно к другим узлам. Мастер, как и DNS-сервер, обеспечивает только поиск информации. Узлы, подписывающиеся на тему, запрашивают соединения от узлов, публикующих эту тему, и позволяют установить связи по согласованному протоколу подключения. Наиболее распространенный протокол, используемый в ROS, называется TCPROS. Он использует стандартный протокол TCP/IP-сокетов. - Сервер параметров. Статические данные ROS хранятся в общедоступном месте – на сервере данных, от которого узлы и получают доступ к этим данным. Мы можем установить объем сервера данных и определить его как частный или общественный, чтобы ограничить доступ к серверу одним узлом или разрешить доступ всем узлам.
- Темы ROS. Узлы обмениваются данными в виде сообщений через систему транспортировки в ROS с конкретным названием темы. Тема – это имя, используемое для идентификации содержания сообщения. Узел, заинтересованный в определенном виде данных, будет подписываться на соответствующую тему. В целом издатель и абонент не знают о существовании друг друга. Идея в том, чтобы отделить производство информации от ее потребления. Логически можно думать о теме как о шине строго типизированных сообщений. Каждая шина имеет имя, и любой может подключаться к ней для отправки или получения сообщений до тех пор, пока они имеют правильный тип.
- Сообщения. Узлы взаимодействуют друг с другом с помощью сообщений. Сообщение ROS состоит из примитивных типов данных, таких как целые числа, плавающие точки, логические значения («true» – «истина» или «false» – «ложь»). Сообщения ROS передаются через тему ROS. Тема может получать или посылать один тип сообщения только один раз. Мы можем создать собственное определение сообщения и передать его через тему.
- Службы. Выше было показано, что переслать/получить сообщение с использованием тем ROS – это очень простой метод общения между узлами. Этот способ коммуникации («один ко многим» – «one-to-many») позволяет подписываться на одну тему любому количеству узлов. В некоторых случаях может осуществляться частичное взаимодействие, обычно применяемое в распределенных системах. Используя определенное сообщение, можно послать запрос в другой узел, предоставляющий нужную услугу. Узел, пославший запрос другому узлу, обязан ожидать результат обработки данного запроса.
- Bags – это формат для сохранения и воспроизведения данных сообщений ROS. Bags – важный механизм для хранения данных, получаемых, например, от датчиков. Эти данные могут быть использованы позже для разработки и тестирования алгоритмов в автономном режиме.
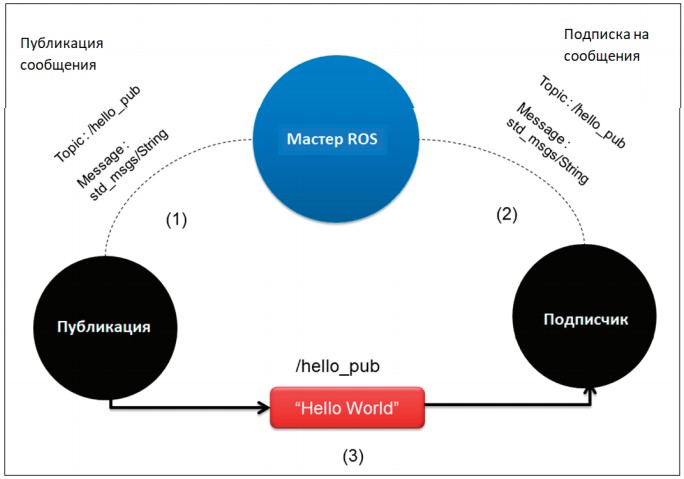
На следующем рисунке показано взаимодействие между мастером, темами, службами и узлами:
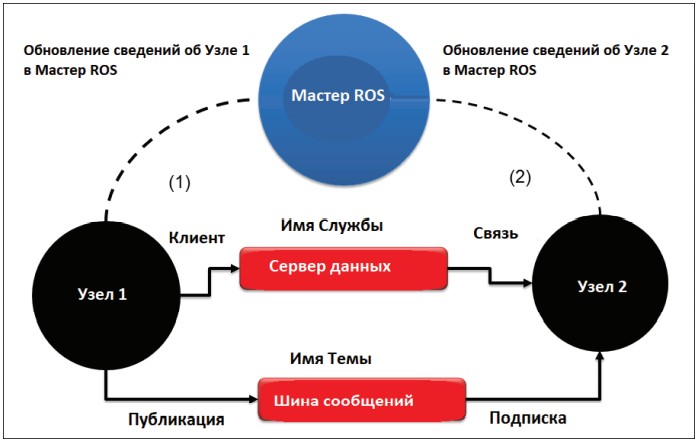
На приведенной выше схеме показана связь, осуществляемая с помощью Мастера ROS (ROS Master) и двух узлов ROS: Узла 1 (Node 1) и Узла 2 (Node 2). Прежде чем начать обмен данными между этими двумя узлами, необходимо запустить Мастер ROS. Master ROS является посредником, позволяющим установить связь и обмениваться информацией между узлами. Например, Узел 1 (Node 1) хочет опубликовать тему/xyz с типом сообщения abc. Для этого он обращается к ROS Master и сообщает, что собирается опубликовать тему/xyz с сообщением вида abc и поделиться ею с другими узлами. А другой узел, например Узел 2 (Node 2), желает подписаться на эту тему/xyz с типом сообщения abc. Мастер сообщает Узлу 2, какой узел опубликовал запрашиваемую информацию, и выделяет порт для связи этих двух узлов напрямую, минуя Мастер ROS.
Таким образом, как уже упоминалось ранее, Master ROS представляет собой DNS-сервер, обеспечивающий поиск запрашиваемой узлами информации. Ранее уже упоминалось, что в ROS применяется протокол связи TCPROS, использующий для связи в основном сокеты TCP/IP.
Уровень общения ROS
Сообщество ROS состоит из разработчиков и исследователей, создающих и поддерживающих пакеты ROS. Они обмениваются между собой информацией о существующих и недавно созданных пакетах и другими новостями, связанными со структурой ROS. Сообщество ROS предоставляет следующие услуги:
распространение. В распространяемых дистрибутивах присутствует ряд пакетов, предназначенных для конкретных версий ROS. В этой книге используется дистрибутив ROS Kinetic. Доступны и другие версии дистрибутивов, например такие, как ROS Lunar или Indigo. Зная версию дистрибутива, легче подобрать к нему недостающие пакеты, которые будут стабильно работать;
репозитории. Репозитории, или мета-пакеты ROS, находятся на удаленных серверах. Также в едином репозитории может храниться отдельный пакет;
Wiki-ROS. На этом ресурсе доступна почти вся документация о ROS. Здесь вы можете получить информацию от фундаментальных понятиях до самого передового программирования. Любой желающий может зарегистрироваться и предоставить собственную документацию, исправления или обновления, написать учебники и т. д.;
списки рассылки. Для получения обновлений следует подписаться на рассылку ROS (http://lists.ros.org/mailman/listinfo/ros-users). Последние новости о ROS и форум, где обсуждается программное обеспечение ROS, находятся по адресу: https://discourse.ros.org;
ответы ROS. Если у вас возникнут вопросы, связанные с ROS, обращайтесь по адресу: https://answers.ros.org/questions/. Здесь вы получите помощь и поддержку от разработчиков со всего мира.
Существует много функциональных возможностей ROS. Для получения дополнительных сведений о них обращайтесь на официальный сайт ROS по адресу: www.ros.org.
В следующей части статьи мы рассмотрим процедуру установки ROS.
Установка ROS на Ubuntu
Как было сказано ранее, ROS – это метаоперационная система, которая устанавливается в ведущей операционной системе (host-системе). ROS полностью поддерживается такой операционной системой, как Linux Ubuntu. Проводились эксперименты с операционными системами и Windows, и OS X. Вот некоторые из последних ROS-дистрибутивов:
| Дистрибутив | Дата выпуска |
| ROS Melodic Morenia | 23 мая 2018 |
| ROS Lunar Loggerhead | 23 мая 2017 |
| ROS Kinetic Kame | 23 мая 2016 |
| ROS Indigo Igloo | 22 июля 2014 |
Теперь рассмотрим процедуру установки стабильной версии дистрибутива ROS Kinetic с долгосрочной поддержкой (LTS) на Ubuntu 16.04.3 LTS. Разработчики ROS Kinetic Kame в первую очередь ориентировались на Ubuntu 16.04 LTS. Вы также можете найти инструкции по настройке ROS LTS Melodic Morenia на Ubuntu 18.04 LTS. Если на вашем компьютере операционной системой является Windows или OS X, то сначала нужно установить виртуальную машину Virtual Box, а затем Linux Ubuntu 16.04 LTS.
Загрузить установочный файл виртуальной машины можно, перейдя по ссылке: https://www.virtualbox.org/wiki/Downloads.
Подробные инструкции по установке вы можете найти на сайте http://wiki.ros.org/kinetic/Installation/Ubuntu. Обратите внимание, что ROS, Gazebo, LibraCad, Blender требуют довольно много места на диске. Поэтому при установке Linux Ubuntu 16.04 LTS увеличьте размер виртуального диска как минимум до 20 гигабайт вместо предлагаемых по умолчанию 10 гигабайт.
Чтобы установить ROS, выполните следующие действия.
1. В левом верхнем углу экрана выберите команду главного меню Приложения → Системные утилиты → Менеджер пакетов. На экране окно приложения, называющегося Менеджер пакетов.
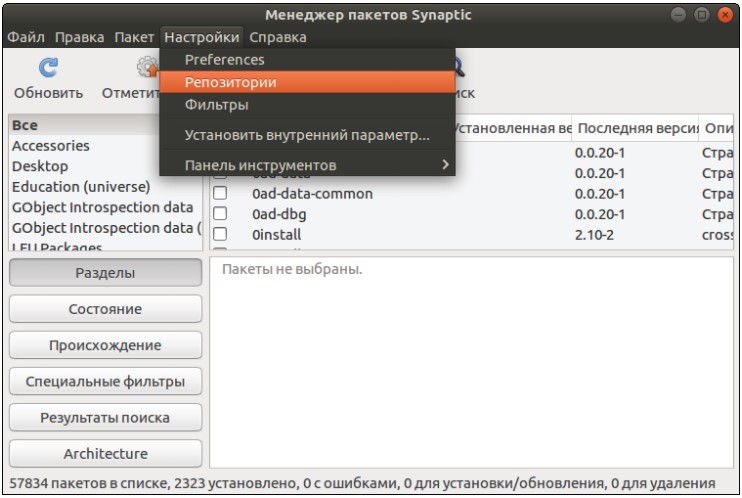
2. Выберите команду Настройки → Репозитории. Откроется окно Программы и обновления.
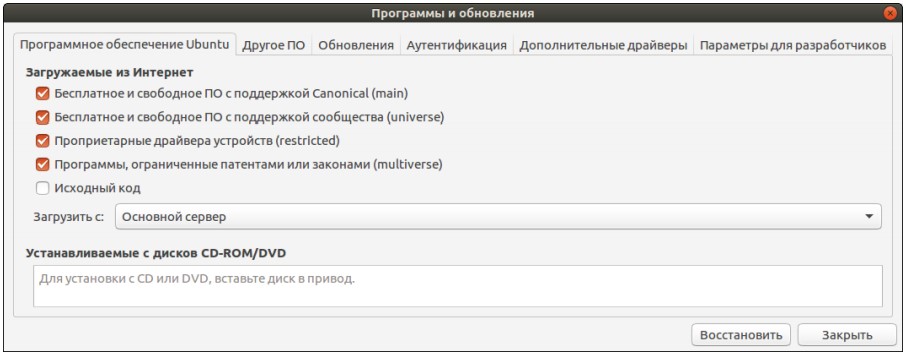
3. Из открывающегося списка Загрузить c: выберите строку Основной сервер (Main server).
4. Установите флажки Проприетарные драйвера устройств (restricted) и Бесплатное и свободное ПО с поддержкой сообщества (universe).
5. Закройте окно Программы и обновления. Теперь вся установка будет проходить с помощью команд, вводимых с клавиатуры.
6. Чтобы запустить приложение Терминал, выберите команду главного меню Приложения → Утилиты → Терминал.
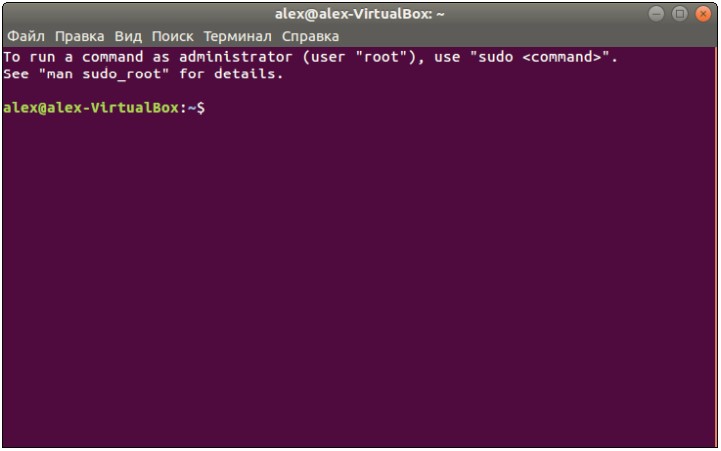
7. Для авторизации в Терминале введите команду sudo su, для завершения ввода команды нажмите клавишу Enter и введите свой пароль. Теперь все остальные команды будут вводиться от имени администратора, и вам не придется начинать каждую команду со слова sudo.
Обратите внимание, что в статье в начале каждой команды будет находиться символ $. Его вводить не нужно, т. к. этот символ обозначает командную строку.
8. Чтобы при установке ROS не возникло ошибок, сначала желательно обновить список источников. Для этого необходимо открыть список источников Sources.list, находящийся в папке etc/apt/, и с помощью редактора Nano отредактировать источник приложений. Введите команду:
$ nano /etc/apt/sources.list
9. В конце списка источников добавьте следующие строки:
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe
multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe
multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe
multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe
multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe
multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe
multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe
multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe
multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe
multiverse
10. Нажмите комбинацию клавиш Ctrl+O, а затем клавишу Enter. Изменения в списке источников приложений сохранены. Нажмите комбинацию клавиш Ctrl+C. Окно редактора закроется, и вы снова вернетесь в терминал.
11. Обновите источники. Для этого выполните следующую команду:
$ apt-get update
Процесс обновления займет некоторое время. После того как обновление завершится, можно приступать к установке ROS Kinetic.
12. Настройте систему для приема пакетов ROS из http://packages.ros.org. ROS Kinetic поддерживается только на Ubuntu 15.10 и 16.04. Следующая команда сохранит http://packages.ros.org в списке apt репозиториев Ubuntu:
$ sh -c ‘echo «deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main» > /
etc/apt/sources.list.d/ros-latest.list’
13. Добавьте apt-key. Apt-key нужен для управления списком ключей, которые используются apt для проверки подлинности пакетов. Пакеты, которые с помощью этих ключей пройдут проверку, будут считаться доверенными. Следующая команда добавит apt-keys для пакетов ROS:
$ apt-key adv —keyserver hkp://ha.pool.sks-keyservers.net:80 —recv-key 421C365BD9
FF1F717815A3895523BAEEB01FA116
14. После добавления apt-ключей требуется обновить список пакетов Ubuntu.
Для совместного обновления пакетов ROS с пакетами Ubuntu выполните следующую команду:
$ apt-get update
15. После того как пакеты ROS обновятся, мы можем их установить. Приведенная ниже команда установит необходимые инструменты и библиотеки ROS:
$ apt-get install ros-kinetic-desktop-full
16. Полная установка займет некоторое время. Возможно, после ее завершения потребуется установить дополнительные пакеты. Каждая дополнительная установка будет упомянута в соответствующем разделе.
17. Следующий шаг – инициализация rosdep. Это позволит легко установить системные зависимости для исходных пакетов ROS, или скомпилировать некоторые компоненты ROS, необходимые для работы:
$ rosdep init
$ rosdep update
18. Чтобы получить доступ к инструментам и командам ROS в текущей оболочке bash, добавим переменные среды ROS в файл bashrc. Эта операция будет выполняться в начале каждой сессии bash. Ниже приведена команда для добавления переменной ROS .bashrc:
$ echo «source /opt/ros/kinetic/setup.bash» >> ~/.bashrc
Следующая команда выполнит .bashrc-скрипт для генерации изменений в текущей оболочке:
$ source ~/.bashrc
После установки ROS мы обсудим, как создать в ней типовой пакет. Сначала следует создать рабочую область ROS. Мы будем использовать систему сборки catkin, представляющую собой набор инструментов для построения пакетов в ROS. Система catkin генерирует исполняемую или общую библиотеку из исходного кода. Поскольку ROS Kinetic для построения пакетов использует инструменты catkin, познакомимся с ним.
19. Одним из полезных инструментов для установки является rosinstall. Данный инструмент устанавливается отдельно. Rosinstall позволяет легко скачать многие исходные деревья пакетов ROS с помощью одной команды:
$ apt-get install python-rosinstall python-rosinstall-generator python-wstool buildessential
Инсталляция последней версии ROS – LTS Melodic похожа на инсталляцию ROS Kinetic Kame. Вы можете установить Melodic вместе с Ubuntu 18.04 LTS. Полная инструкция по установке находится по адресу: http://wiki.ros.org/melodic/Installation/Ubuntu.
Введение в catkin
Catkin является официальной версией системы сборки системы ROS. До ее появления использовали систему для сборки пакетов, называющуюся Rosbuild. Ее заменили на catkin в версиях, начинающихся с ROS Indigo. Для обеспечения нормального технологического процесса в Catkin совместно со скриптами Python используется макрос CMake. Catkin обеспечивает лучшие распределение пакетов и кросс-компиляцию. К тому же она более мобильна, чем система Rosbuild. Для получения дополнительной информации обратитесь по адресу: wiki.ros.org/catkin.
Рабочее пространство Сatkin – это папка, в которой можно создавать, изменять и устанавливать пакеты catkin.
Давайте посмотрим, как создать рабочее пространство ROS catkin.
Представленная ниже команда создаст родительский каталог catkin_ws и вложенную папку с именем src:
$ mkdir -p ~/catkin_ws/src
Переместите созданный родительский каталог в папку src с помощью приведенной ниже команды. Мы создадим наши пакеты в папке src:
$ cd ~/catkin_ws/src
Используя следующую команду, инициализируйте рабочую область catkin:
$ catkin_init_workspace
После инициализации рабочей области catkin у нас появится возможность собрать пакет (даже при отсутствии исходного файла). Для этого используем приведенную ниже команду:
$ cd ~/catkin_ws/
$ catkin_make
Команда catkin_make используется для построения пакетов внутри каталога src.
После сборки пакетов в каталоге catkin_ws мы увидим папки build и devel. В папке Build будут сохранены исполняемые файлы, а в папке devel появятся сценарии оболочки для добавления в рабочую область среды ROS.
Создание пакета ROS
В этом разделе мы расскажем, как создать образец пакета, содержащего два узла Python. Один из узлов опубликует в тему сообщение Hello World, а другой узел на эту тему подпишется.
Пакет catkin ROS создается в ROS с помощью команды catkin_create_pkg. Данный пакет появится внутри ранее созданной папки src. Перед созданием пакетов перейдите в папку src с помощью следующей команды:
$ cd ~/catkin_ws/src
Приведенная ниже команда создаст пакет hello_world с зависимостью std_msgs, содержащий стандартные определения сообщений. Rospy является клиентской библиотекой Python для ROS:
$ catkin_create_pkg hello_world std_msgs rospy
После успешного создания пакета мы получим следующее сообщение:
Created file hello_world/package.xml
Created file hello_world/CMakeLists.txt
Created folder hello_world/src
Successfully created files in /home/имя_пользователя/catkin_ws/src/hello_world. Please adjust the values in package.xml
После того как пакет hello_world будет успешно создан, следует добавить два узла со скриптами Python для демонстрации подписки и публикации разделов. Для этого нужно в пакете hello_world создать папку для хранения двух текстовых файлов-сценариев и сами пустые файлы hello_world_publisher.ру и hello_world_subscriber.py. Далее, не выходя из Терминала, с помощью любого текстового редактора, например Nano, отредактируем оба файла сценария, введя соответствующие коды. Затем мы сможем изменить права доступа и запустить сценарии на исполнение.
Итак, создадим папку scripts:
$ mkdir scripts
Перейдем во вновь созданную папку:
$ cd ~/catkin_ws/src/scripts
Создадим два пустых файла и назовем их hello_world_publisher.ру и hello_world_subscriber.py.
$ touch hello_world_publisher.py
$ touch hello_world_subscriber.py
C помощью команды Ls проверим, были ли созданы в папке scripts два файла:
$ Ls
В ответ мы получим список файлов, хранящихся в данной папке:
hello_world_publisher.py hello_world_subscriber.py
Итак, файлы созданы. Теперь для каждого файла поочередно запустим редактор nano и внесем строки кода. Запускаем nano для файла hello_world_publisher.py:
$ nano ~/catkin_ws/src/scripts/hello_world_publisher.py
Далее нужно ввести скрипт с клавиатуры. На рисунке ниже показан скрипт сценария hello_world_publisher.py. При вводе строк скрипта особое внимание нужно обратить на отступы:
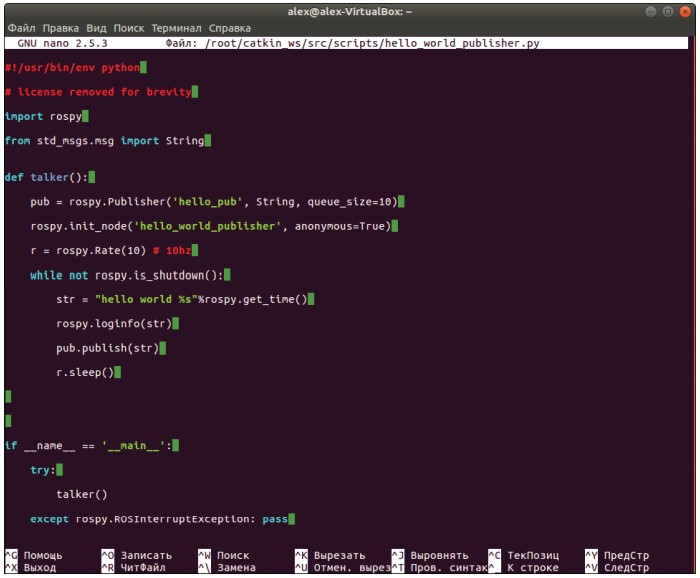
Чтобы сохранить скрипт и закрыть окно редактора, нажмите комбинацию клавиш Ctrl+O, клавишу Enter и комбинацию клавиш Ctrl+X.
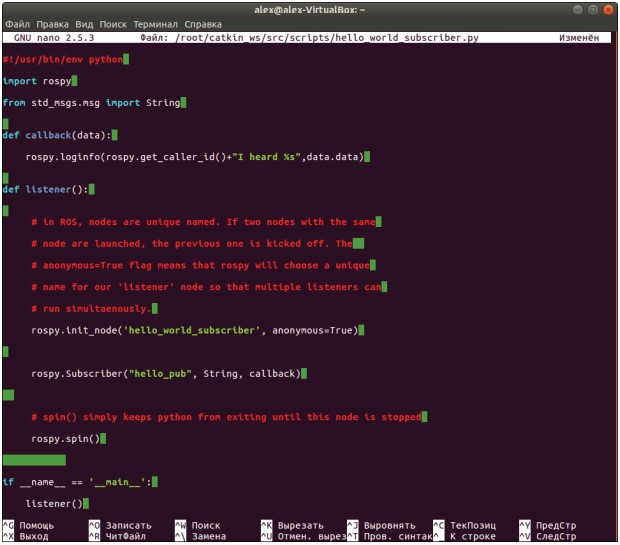
Отредактируйте таким же образом файл hello_world_subscriber.py.
$ nano ~/catkin_ws/src/scripts/hello_world_subscriber.py
После того как текст скриптов будет внесен в оба файла и редактор nano закроется, следует изменить права доступа к файлам (опубликовать) и запустить скрипты на исполнение.
Следующие два раздела дают полное описание скриптов с именами hello_world_publisher.ру и hello_world_subscriber.py.
Далее с помощью введенных в Терминал команд chmod будут изменены права доступа к исполняемому файлу. Благодаря команде catkin_make мы создадим пакет, после чего запустим скрипты на исполнение.
Hello_world_publisher.py
Узел hello_world_publisher.py публикует приветствие, вызывая сообщение hello world в теме /hello_pub. Приветствие в теме публикуется с частотой 10 Гц.
Вот схема, показывающая взаимодействие между двумя узлами ROS:
Полный код статей доступен по адресу: https://github.com/qboticslabs/learning_robotics_2nd_ed.
Коды двух узлов показаны на снимках с экрана, приведенных выше.
Пошаговое описание этого кода выглядит следующим образом.
1. Для написания узла ROS на Python нам требуется импортировать rospy. Его назначение – организовать взаимодействие ROS с темами, сервисами и т. д.
2. Чтобы отправить сообщение hello world, из пакета std_msgs мы импортируем строковый тип данных. Он определяет сообщения для стандартных типов данных. Импорт производится с помощью следующей команды:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
3. Следующая строка кода отвечает за создание объекта издателя в разделе с именем hello_pub. Тип данных – String (строка), queue_size (размер очередности) – 10. Если абонент медленно получает данные, используйте параметр queue_size для его настройки:
def talker():
pub = rospy.Publisher(‘hello_pub’, String, queue_size=10)
4. Следующая строка кода является обязательной для всех узлов ROS Python. Ее назначение – инициализация узла и назначение ему имени. Пока узел не получит имя, он не может быть запущен. Для взаимодействия с другими узлами он должен использовать свое имя. Если двум узлам будет присвоено одинаковое имя, возникнет конфликт имен и узлы прекратят свою работу. Для запуска обоих узлов следует использовать признак anonymous=True, как показано ниже:
rospy.init_node(‘hello_world_publisher’, anonymous=True)
5. Следующая строка создает объект c названием r. Используя в объекте Rate() метод sleep(), мы можем выбрать желаемую частоту цикла. В показанной ниже строке выберем обновление цикла с частотой 10 Гц:
r = rospy.Rate(10) # 10hz
6. Следующий цикл проверяет, создает ли rospy признак завершения цикла rospy.is_shutdown(). Если этот признак отсутствует, цикл повторяется. Чтобы завершить цикл вручную, достаточно нажать комбинацию клавиш Ctrl+C. Сообщение hello_world внутри цикла публикуется по теме
hello_pub с частотой 10 Гц:
while not rospy.is_shutdown():
str = «hello world %s»%rospy.get_time()
rospy.loginfo(str)
pub.publish(str)
r.sleep()
7. Следующий код Python _main_ наблюдает за выполнением кода и появлением признака rospy.ROSInterruptException, вызываемого методом rospy.sleep() и rospy.Rate.sleep(). Узел продолжает работать до появления данного признака или до нажатия комбинации клавиш Ctrl+C.
If __name___ == ‘__main__’:
try:
talker()
except rospy.ROSInterruptException: pass
Итак, тема опубликована. Далее будет показано, как на эту тему подписаться. В следующем разделе мы рассмотрим код для подписки на тему hello_pub.
Hello_world_subscriber.py
Код подписчика выглядит следующим образом:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
Данный код – это функция обратного вызова, которая выполняется при появлении сообщения hello_pub тема. Переменная данных содержит сообщение от темы и создаст сообщение rospy.loginfo():
def callback(data):
rospy.loginfo(rospy.get_caller_id()+»I heard %s»,data.data)
Следующим действием будет запуск узла с именем hello_world_subscriber и запуск подписки на тему /hello_pub.
1. Типом данных сообщения будет String (строка). Даже по прибытии сообщения в тему тип данных не изменится. Этот метод называется методом обратного вызова и запускается следующим образом:
def listener():
rospy.init_node(‘hello_world_subscriber’,anonymous=True)
rospy.Subscriber(«hello_pub», String, callback)
2. Данный код не позволит узлу выйти до завершения работы самого узла:
rospy.spin()
3. Следующий очень важный шаг – это проверка кода на языке Python. Основной раздел вызывает метод listener(), который, в свою очередь, создаст подписку на тему /hello_pub:
if __name__ == ‘__main__’:
listener()
Итак, скрипты двух узлов написаны и сохранены. Теперь, как говорилось ранее, нужно изменить права доступа к исполняемым файлам.
4. Это делается с помощью команды chmod:
$ chmod +x hello_world_publisher.py
$ chmod +x hello_world_subscriber.py
5. После того как права доступа будут изменены, необходимо с помощью команды catkin_make создать пакет:
cd ~/catkin_ws/
catkin_make
6. Следующая команда добавит текущий путь в рабочей области ROS во всех конечных устройствах так, чтобы у нас появился доступ ко всем пакетам ROS внутри этой рабочей области:
echo «source ~/catkin_ws/devel/setup.bash» >> ~/.bashrc
source ~/.bashrc
Ниже приведены выходные данные узлов подписчика и издателя:
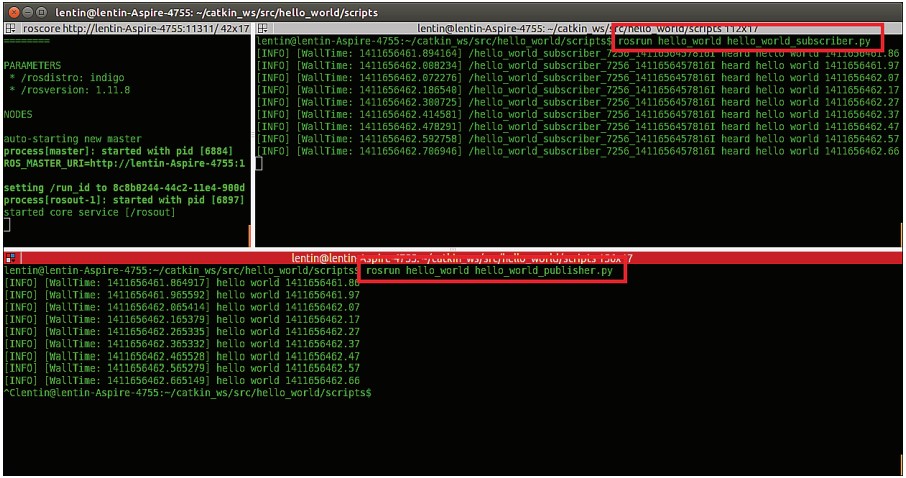
Далее можно запустить созданные узлы.
1. Перед запуском узла сначала следует запустить roscore. Команда roscore, или Мастер ROS, необходима для установки связи между узлами.
Для запуска roscore выполните команду:
$ roscore
2. Далее запустите каждый из двух узлов. Для этого используйте две приведенные ниже команды:
- для запуска публикации выполните следующую команду:
$ rosrun hello_world hello_world_publisher.py - для управления узлом, который подписывается на тему hello_pub, служит команда:
$ rosrun hello_world hello_world_subscriber.py
Узлы запущены, и в Терминале вы увидите сообщение, похожее на приведенное ниже:
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
auto-starting new master
process[master]: started with pid [2316]
ROS_MASTER_URI=http://alex-VirtualBox:11311/
setting /run_id to 0a1de67e-f011-11e8-949a-0800278d5979
process[rosout-1]: started with pid [2329]
started core service [/rosout]
rosrun hello_world hello_world_publisher.py
rosrun hello_world hello_world_subscriber.py
В этом разделе мы рассмотрели основные функции ROS. Теперь необходимо познакомиться с Gazebo и узнать, как, используя ROS, работать с этой программой.
Введение в Gazebo
Gazebo – это программа с открытым исходным кодом, моделирующая работу робота. С помощью данного симулятора мы можем не только проверить конструкцию и алгоритмы разрабатываемого робота, но и выполнить тестирование с использованием реалистичных сценариев. Gazebo может точно и эффективно имитировать работу робота в помещении и вне его. Gazebo создана на движке с высоким качеством графики и удобным программно-графическим интерфейсом.
Отметим следующие особенности Gazebo:
- динамическое моделирование. Gazebo может имитировать движение робота с помощью такого имитатора движения (кинематики и динамики), как Open Dynamics Engine – ODE (http://opende.sourceforge.net/), Bullet (http://bulletphysics.org/wordpress/), Simbody (https://simtk.org/projects/simbody/) и DART (Dynamic Animation and Robotics Toolkit – Набор инструментов для динамической анимации и робототехники) (http://dartsim.github.io/);
- улучшенная 3D-графика. Gazebo с помощью фреймворка OGRE обеспечивает высокое качество визуализации, освещения, тени и http://www.ogre3d.org/;
- поддержка датчиков. Gazebo поддерживает широкий спектр датчиков, в том числе лазерные дальномеры, сенсоры kinect style, 2D/3D-камера и т. д. Мы можем имитировать движение как с препятствиями, так и без них;
- Plug-in. Мы можем разрабатывать плагины для робота и всех его датчиков, включая датчики контроля окружающей среды. Плагины могут получить доступ к API Gazebo;
- модели роботов. Gazebo может создавать модели популярных роботов, таких как PR2, Pioneer 2 DX, iRobot и TurtleBot. Мы можем также построить нестандартные модели роботов;
- протокол TCP/IP. С помощью службы передачи сообщений socket-based мы можем запустить на удаленной машине интерфейс Gazebo и моделирование;
- облако симуляции. Используя фреймворк CloudSim (http://cloudsim.io/), мы можем запустить моделирование на облачном сервере;
- инструменты командной строки. Для проверки используются инструменты командной строки и протоколы моделирования.
Установка Gazebo
Gazebo может устанавливаться в двух вариантах: как автономная программа или как приложение, интегрированное с ROS. В этой главе мы установим Gazebo, интегрированную с ROS, чтобы при моделировании проверить код, написанный с использованием фреймворка ROS.
Последняя версия симулятора Gazebo находится здесь: http://gazebosim.org/download.
Для работы с симулятором Gazebo не нужно устанавливать отдельно от ROS, т.к. при полной установке ROS Gazebo устанавливается автоматически.
Пакет ROS с интегрированным симулятором Gazebo называется gazebo_ros_pkgs. Этот пакет с помощью служб сообщений ROS предоставляет интерфейс для моделирования робота в Gazebo.
Для установки полной версии пакета gazebo_ros_pkgs в ROS Kinetic выполните
следующую команду:
$ sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-ros-control
Тестирование Gazebo с интерфейсом ROS
Мы предполагаем, что среда ROS настроена правильно.
Прежде чем запустить Gazebo, запустите roscore, если он не запущен:
$ roscore
Чтобы с помощью ROS запустить Gazebo, выполните следующую команду:
$ rosrun gazebo_ros gazebo
Gazebo работает как два исполняемых файла: сервер Gazebo и клиент Gazebo. Gazebo-сервер выполняет процесс моделирования, а Gazebo-клиент вызывает графический интерфейс. С помощью предыдущей команды $ rosrun gazebo_rosgazebo сервер Gazebo и клиент Gazebo будут работать одновременно.
Графический интерфейс Gazebo показан на следующем скриншоте:
Итак, Gazebo запущена.
Чтобы отобразить список сгенерированных тем, выполните следующую команду. Возможно, для ее ввода вам придется запустить еще один терминал. Для этого в строке меню терминала выберите команду File (Файл) → Open Terminal (Открыть терминал). Ниже вы увидите список сгенерированных тем.
$ rostopic list
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
Сервер и клиент можно запустить отдельно.
- Чтобы запустить сервер Gazebo, используйте следующую команду:
$ rosrun gazebo_ros gzserver - Клиент Gazebo запускается с помощью команды:
$ rosrun gazebo_ros gzclient
Итоги
Это была вводная статья, благодаря которой мы познакомились с основными понятиями операционной системы роботов (ROS), ее установкой и программированием с помощью языка программирования Python. Кроме того, мы рассмотрели, как установить и запустить программу – имитатор роботов Gazebo.
В следующей статье мы познакомимся с основными принципами дифференциального привода робота.
За основу данной статьи взята книга Д. Лентина «Изучение робототехники с использованием Python»
С Уважением, МониторБанк