Начало работы с операционной системой для робота (ROS)
 Основная цель данной серии статей – помочь вам создать автономный мобильный робот. Робот оснащается операционной системой ROS, а все операции будут смоделированы с помощью программы-симулятора, называющейся Gazebo. Также в этих статьях вы найдете теоретический расчет, проект робота, чертежи деталей, внутреннее программное обеспечение и программное обеспечение высокого уровня, интегрированное с ROS. (далее…)
Основная цель данной серии статей – помочь вам создать автономный мобильный робот. Робот оснащается операционной системой ROS, а все операции будут смоделированы с помощью программы-симулятора, называющейся Gazebo. Также в этих статьях вы найдете теоретический расчет, проект робота, чертежи деталей, внутреннее программное обеспечение и программное обеспечение высокого уровня, интегрированное с ROS. (далее…)
 Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Скорпион». Сборка состоит из 77 деталей и 26 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена примерная управляющая программа.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Скорпион». Сборка состоит из 77 деталей и 26 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена примерная управляющая программа.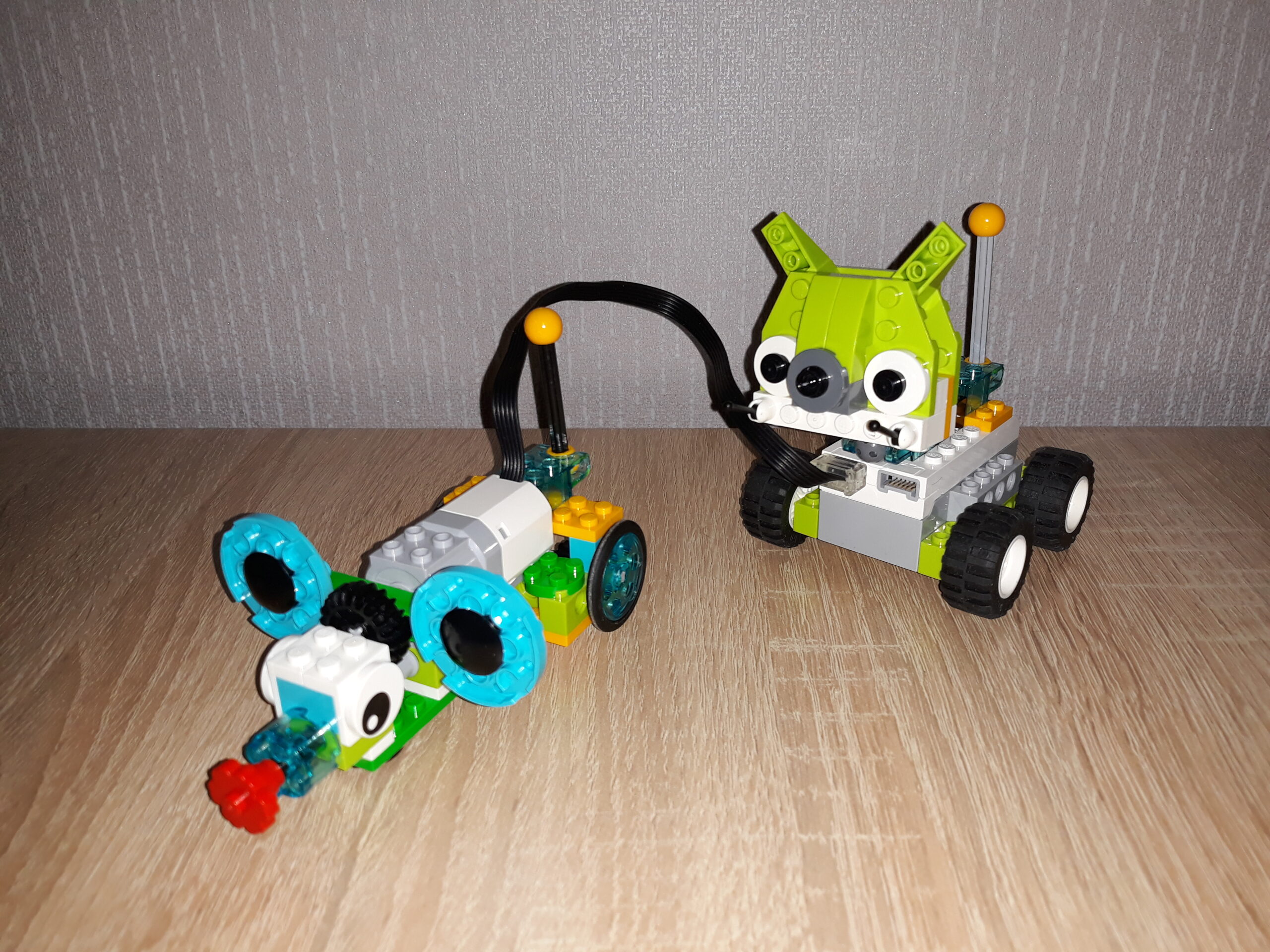 Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Том и Джерри». Сборка состоит из 97 деталей и 51 пошагового слайда. В конце презентации детей ждут задания по собранной модели. В презентации представлены две управляющие программы.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Том и Джерри». Сборка состоит из 97 деталей и 51 пошагового слайда. В конце презентации детей ждут задания по собранной модели. В презентации представлены две управляющие программы. Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Велосипедист». Сборка состоит из 124 деталей и 35 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена управляющая программа.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Велосипедист». Сборка состоит из 124 деталей и 35 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена управляющая программа. Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Паук». Сборка состоит из 111 деталей и 29 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена управляющая программа.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Паук». Сборка состоит из 111 деталей и 29 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена управляющая программа. Представляем вашему вниманию классную пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Горилла». Сборка состоит из 109 деталей и 34 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлены две управляющие программы.
Представляем вашему вниманию классную пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Горилла». Сборка состоит из 109 деталей и 34 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлены две управляющие программы. Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Модифицированный грузовичок». Сборка состоит из 100 деталей и 37 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Модифицированный грузовичок». Сборка состоит из 100 деталей и 37 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации.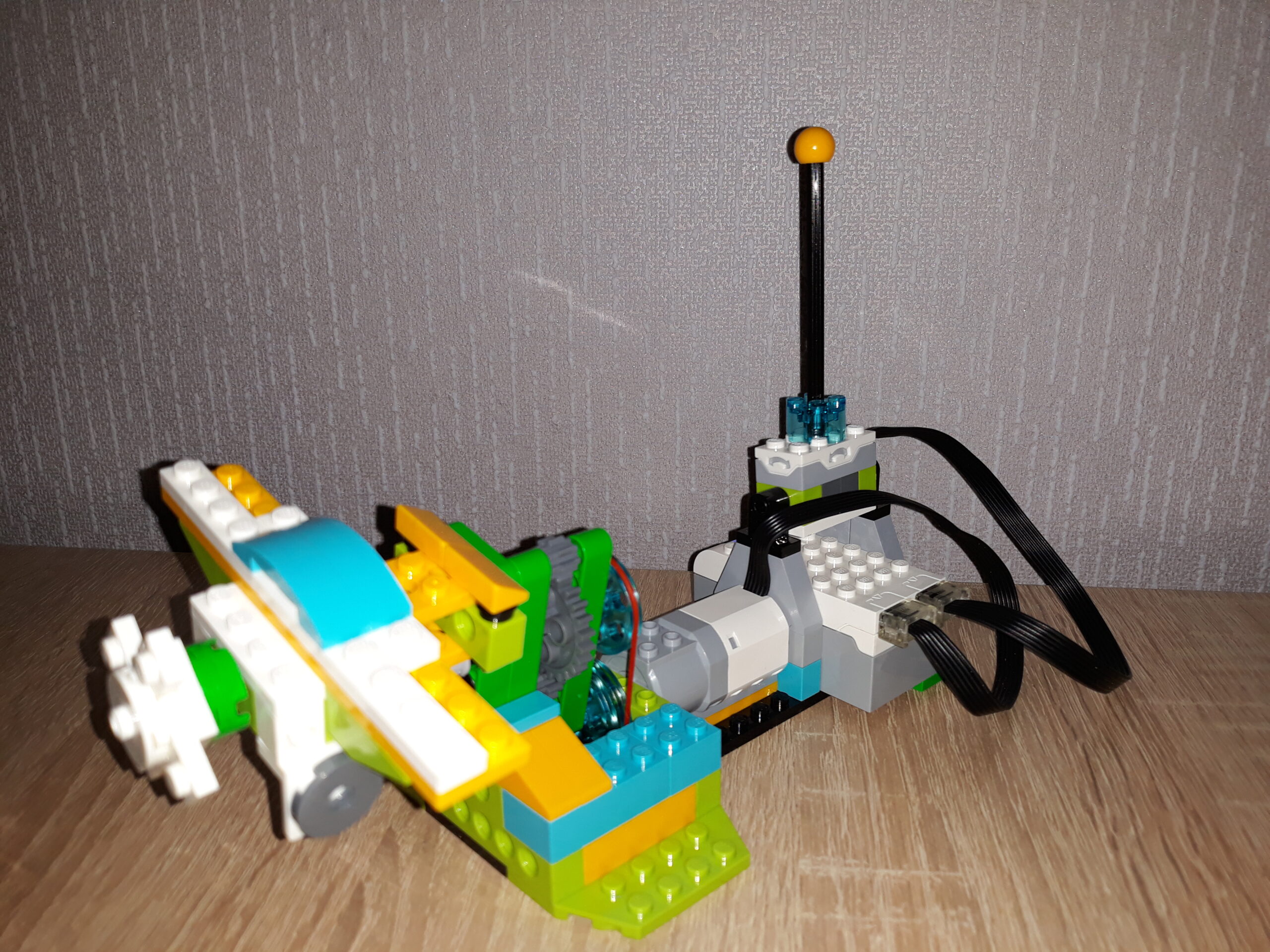 Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Самолет на виражах». Сборка состоит из 98 деталей и 26 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Самолет на виражах». Сборка состоит из 98 деталей и 26 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации.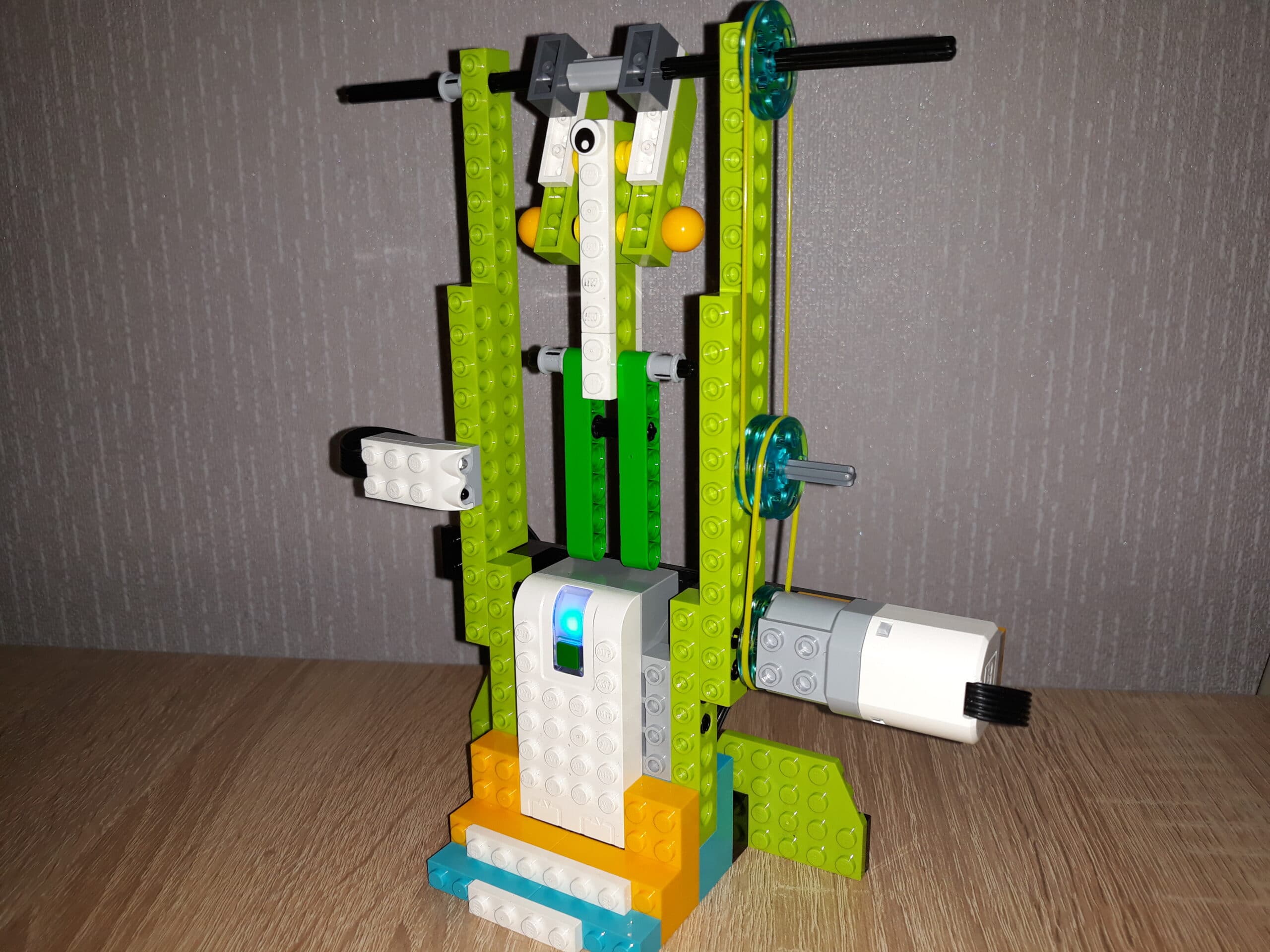 Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Гимнаст». Сборка состоит из 78 деталей и 24 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Гимнаст». Сборка состоит из 78 деталей и 24 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу найдете в презентации. Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Лиса». Сборка состоит из 138 деталей и 34 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу дети должны написать сами.
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Лиса». Сборка состоит из 138 деталей и 34 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. Управляющую программу дети должны написать сами.