Разработка графического интерфейса для робота с использованием Qt и Python
 И наконец, наша серия статей подходит к концу, и в этой завершающей статье мы обсудим аппаратную сборку, интеграцию компонентов роботизированного оборудования и программные комплексы для выполнения задач автономной навигации. Далее необходимо будет создать графический интерфейс для управления роботом. Мы создадим графический интерфейс, который сможет действовать как триггер для базовых команд ROS. Вместо выполнения всех команд в терминале пользователь сможет управлять роботом с помощью графических кнопок. Графический интерфейс, который мы собираемся разработать, предназначен для типичного гостиничного номера с девятью столами. Пользователь сможет установить положение стола на карте гостиничного номера и командовать роботом для доставки еды к определенному столу. После того как еда будет доставлена, робот получит команду для возвращения в исходное положение. (далее…)
И наконец, наша серия статей подходит к концу, и в этой завершающей статье мы обсудим аппаратную сборку, интеграцию компонентов роботизированного оборудования и программные комплексы для выполнения задач автономной навигации. Далее необходимо будет создать графический интерфейс для управления роботом. Мы создадим графический интерфейс, который сможет действовать как триггер для базовых команд ROS. Вместо выполнения всех команд в терминале пользователь сможет управлять роботом с помощью графических кнопок. Графический интерфейс, который мы собираемся разработать, предназначен для типичного гостиничного номера с девятью столами. Пользователь сможет установить положение стола на карте гостиничного номера и командовать роботом для доставки еды к определенному столу. После того как еда будет доставлена, робот получит команду для возвращения в исходное положение. (далее…)
 В предыдущей статье «
В предыдущей статье «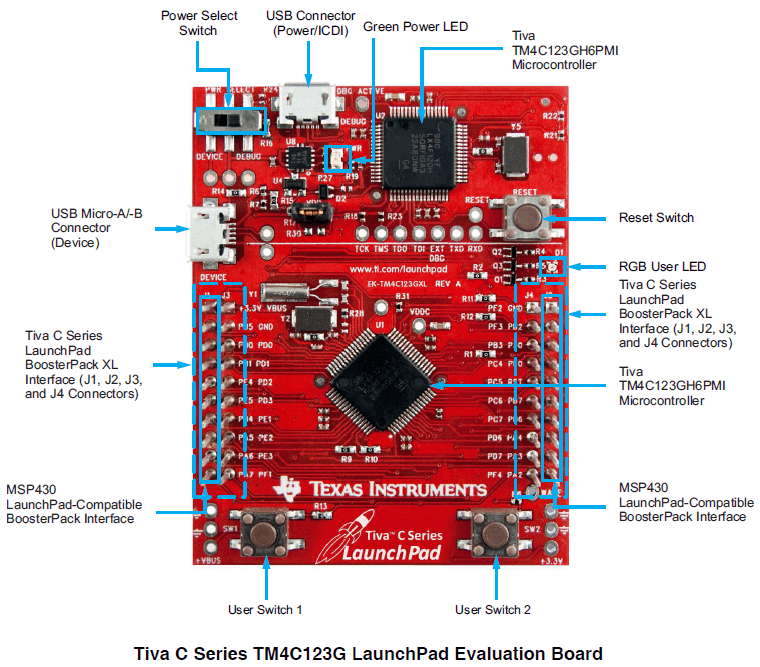 В предыдущей статье «
В предыдущей статье « В этой статье мы обсудим конструкцию, принципы работы оборудования ChefBot и выбор аппаратных компонентов. В предыдущей статье «
В этой статье мы обсудим конструкцию, принципы работы оборудования ChefBot и выбор аппаратных компонентов. В предыдущей статье «
 В этой статье мы рассмотрим модель робота с дифференциальным приводом и создадим URDF-модель робота в ROS. URDF – это универсальный формат XML-файла, используемый для описания всех элементов робота в ROS.
В этой статье мы рассмотрим модель робота с дифференциальным приводом и создадим URDF-модель робота в ROS. URDF – это универсальный формат XML-файла, используемый для описания всех элементов робота в ROS. В предыдущей статье «
В предыдущей статье « Основная цель данной серии статей – помочь вам создать автономный мобильный
Основная цель данной серии статей – помочь вам создать автономный мобильный