 Создавая шагающего робота, конструктор должен ответить на множество вопросов. Некоторые из них носят общий характер, но некоторые необходимо разбирать детально. В статье мы описали наиболее важные вопросы, связанные с дизайном и сборкой шагающих мобильных роботов.
Создавая шагающего робота, конструктор должен ответить на множество вопросов. Некоторые из них носят общий характер, но некоторые необходимо разбирать детально. В статье мы описали наиболее важные вопросы, связанные с дизайном и сборкой шагающих мобильных роботов.
Мы сосредоточились в этой статье на самом двигательном аппарате, и на возможных технических решениях, вытекающих из принятых допущений. Классификация шагающих роботов может варьироваться в зависимости от выбранных критериев.
| Этими критериями могут быть: количество лап (ног), тип походки, тип устойчивости походки, характер движений. |
Некоторые критерии тесно связаны, например, с количеством лап или ног, а также с возможными типами походки. Итак, давайте посмотрим на приведенные выше классификации.
Модели движения
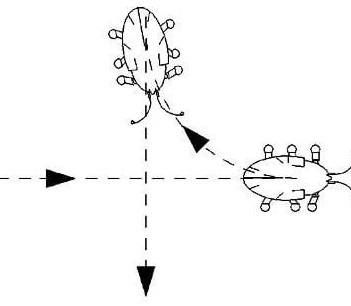
Если движение шагающего робота похоже на походку животного, то такая модель называется биологической моделью. Конструирование таких роботов началось с наблюдения и попытки имитировать походку различных существ. На рисунке ниже показано типичное расположение лап насекомых, рептилий и млекопитающих.
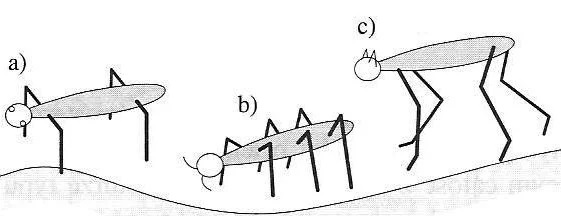
Из рисунка виден важный критерий — это высота центра тяжести.
| Чем выше центр тяжести робота, тем труднее удерживать его в равновесии. |
Типы ног
Другой критерий, связанный с биологической структурой, — это тип ног или лап. У робота могут быть одинаковые ноги, у него могут быть пары разных ног (по длине и / или форме). Это связано не только с их выбором, но и с возможными типами движения. Проще, и обычно дешевле, сделать робота с одинаковыми ногами.
Следующий, и последний критерий, связан с расположением ног по отношению к туловищу. Здесь снова у нас есть несколько вариантов:
лапы, расставленные симметрично по кругу

или лапы, расставленные по обеим сторонам робота, т.е. лапы находятся под телом — как у млекопитающего.

Своего рода стабильность
Еще один важный критерий — это тип устойчивости. Это неразрывно связано с количеством лап. Различают следующие типы устойчивости: статически стабильная походка, динамически стабильная походка и квазистатическая стабильная походка.
Статически стабильная походка
Статически стабильная походка — это походка, при которой робот может быть остановлен в любой момент, без потери равновесия. Классическим примером этого типа движений является походка шестиногих роботов.
Динамически стабильная походка
Противоположность этому типу движений — динамически устойчивая походка. В этом случае, только в определенные моменты движения, робот может быть остановлен, в другие, сохраняется стабильность походки за счет динамики движения. Остановка в такой момент приведет к опрокидыванию робота.
Квазистатическая устойчивая походка
Последний тип — квазистатическая устойчивая походка. В этом случае, в отличие от других, устойчивость походки обеспечивается конструкцией ноги. Примером может служить походка двуногих роботов с большими и тяжелыми ступнями, в которой стабильность движения обеспечивает «маятник» — движущаяся нога уравновешивает наклон туловища.
Количество ног робота
В этом случае крепим любое количество ног. Их минимальное количество может быть равно нулю — в этом случае это будут, например, змееподобные ползучие роботы. Однако, когда мы говорим о педипуляторах (шагающих роботах), мы имеем в виду роботов с определенным количеством лап или ног — одной, двумя, четырьмя, шестью и более.
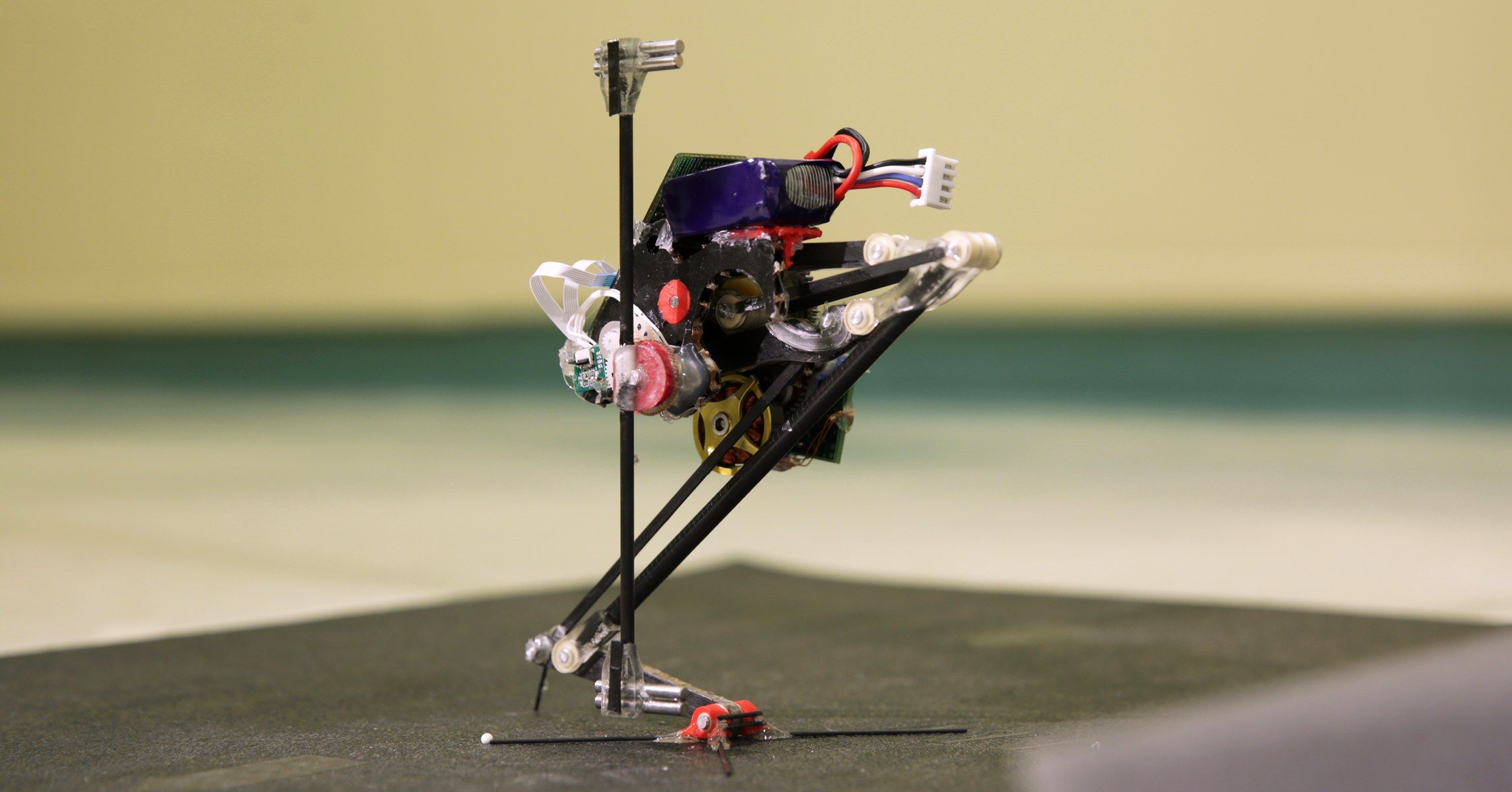
Одноногий или однолапый робот
В случае с одноногим роботом мы можем говорить только об одном виде походки — прыжках. Это динамический тип движения. Только благодаря большой мощности приводов, очень быстрой системе управления и датчикам, а также сложному алгоритму робот не опрокидывается при движении.
Двуногие роботы
Двуногие или двулапые роботы характеризуются динамически устойчивой походкой. Обычно ходят на согнутых ногах. Биологический образец таких роботов — человек.
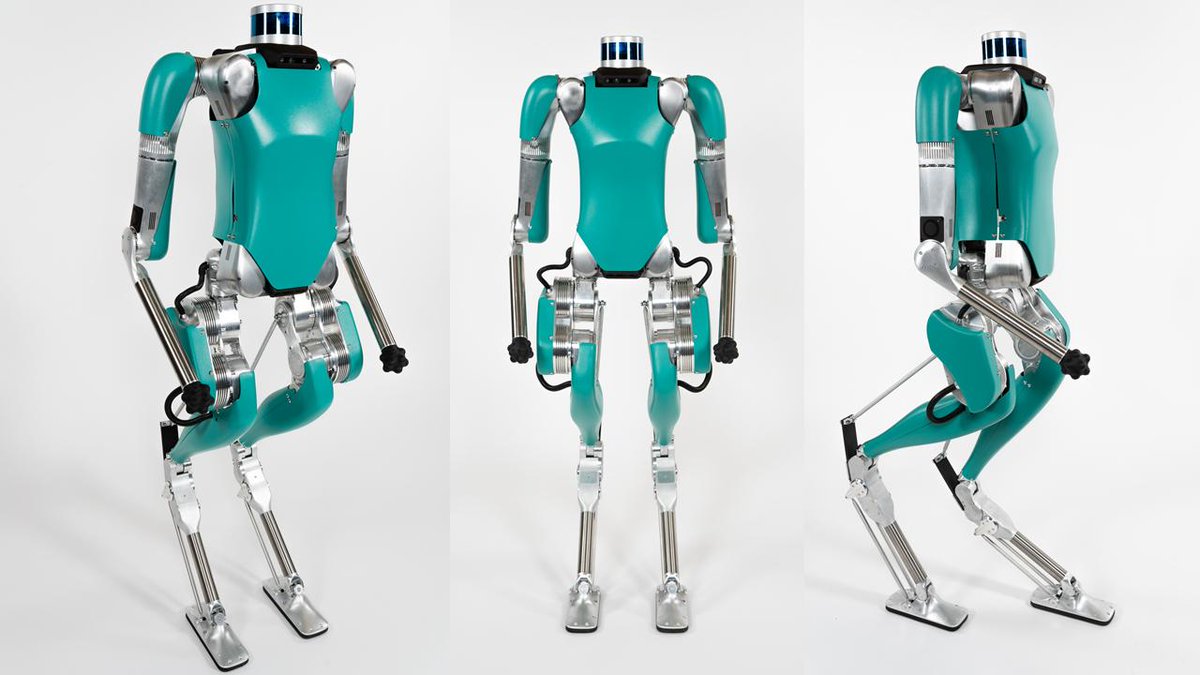
Они также могут двигаться квазистабильным статическим движением. В этом случае структура ноги, а именно большая ступня, позволяет распределять баланс силы на большой площади, под которой также находится центр тяжести робота. Кроме того, относительно большая масса одной ноги позволяет балансировать вместе с телом во время движения и обеспечивает противовес туловищу.
Четвероногие роботы
Квадропеды — роботы с четырьмя ногами или лапами. В этом случае биологический образец обычно — млекопитающие или рептилии. Эти роботы могут двигаться как динамически стабильно (галопом), так и статически (перемещая одну ногу за один раз). Шестиногие роботы также могут двигаться как статически, так и динамически.
Таким образом, алгоритм движения является наиболее простым в программировании из всех перечисленных групп, единственная трудность может заключаться в большом количестве степеней свободы.
Многоногие роботы
Также есть группа многоногих роботов с более чем шестью ногами. В таком решении (до тех пор, пока мы должны контролировать каждую ногу отдельно) система управления усложняется. Эти роботы передвигаются статически стабильной походкой. Максимальное количество возможных шагов определяется формулой, приведенной Макги в 1968 году :
![]()
Где:
k — количество ног
N — количество возможных видов походки
! — означает факториал
Для молодых адептов робототехники, которые могут не знать эту математическую функцию — мы привели дополнительное пояснение:
! — факториал — это произведение всех чисел от 2 до n.
Пример:
6! = 2 ∙ 3 ∙ 4 ∙ 5 ∙ 6 = 720.
Для шестиногого робота результат формулы МакГи:
(2 ∙ 6-1)! = 11! = 39 916 800 возможных шагов.
Тип походки
Последний из этих критериев — тип походки. Приведенная выше формула дает максимально возможное количество шагов, но не все роботы могут двигаться всеми перечисленными способами. Это ограничение проистекает из используемых приводов, выбранного устройства движения и его ограничений, а также ограничений системы управления, особенно ее скорости.
Если у привода нет большого запаса мощности и динамики, то робот может двигаться только статически устойчивой походкой. Конструкция ног и механические связи между отдельными ногами (или степени свободы одной ноги) также ограничивают количество возможных аллюров. Это количество может быть ограничено одним типом.
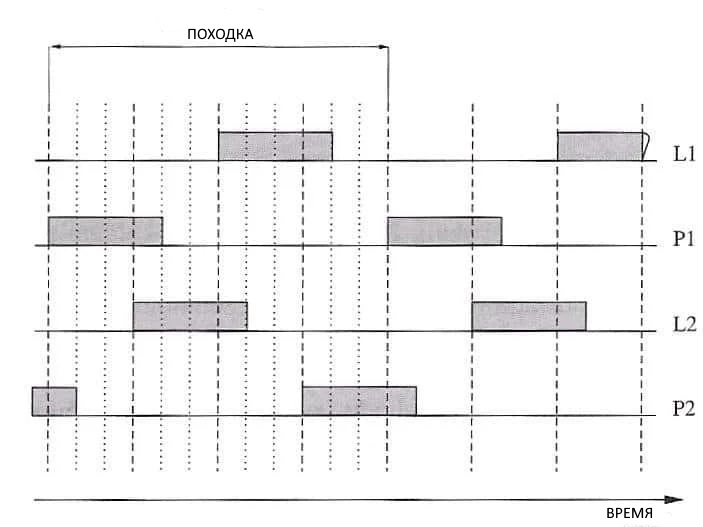
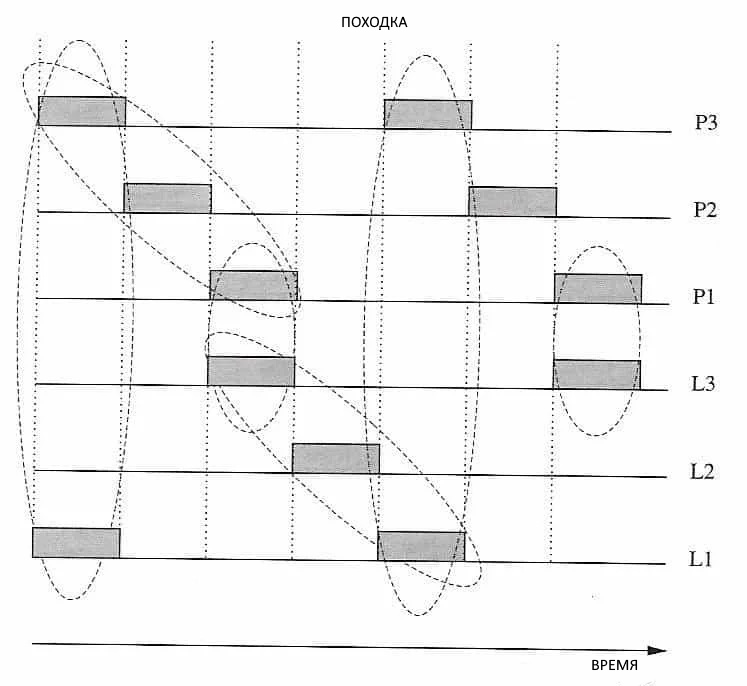
Волновое движение очень популярно и легко реализуемо. Указанная здесь последовательность смены ног является циклической. Эту походку можно представить в виде диаграмм походок. Примеры схем представлены на рисунках ниже. Фаза движения ноги называется фазой вытягивания, а период, в течение которого нога соприкасается с землей, называется фазой рефрактерности. Эту походку еще называют периодической.
Примеры схем походки четвероногого и шестиногого роботов:
 |
 |
 |
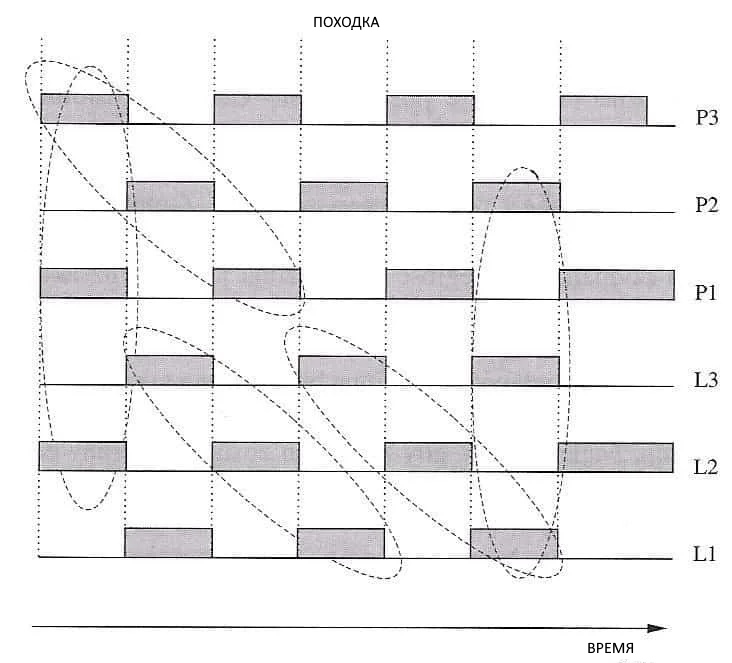 |
Эти походки используются на прямых и плоских поверхностях. Их преимущество — простота реализации. Другой вид — свободная походка — вольный стиль . В этом случае решение о том, какую ногу переместить и куда поставить, принимается постоянно. Такая походка требует сложного алгоритма управления, датчиков и быстрой системы управления. Её преимущество — очень широкий спектр применения — она подходит для использования на сложной местности.
Последний вид походки — это движение проводника. Следующая нога ставится на то место, где ранее находилась предыдущая нога. Её применение аналогично свободному движению.
Проектирование робота
При проектировании робота мы должны выбрать конкретный привод:
- электродвигатели
- пневматические приводы
- гидроцилиндры
У каждого из них есть свои достоинства и недостатки. В мобильных роботах (особенно любительских) чаще всего используются электродвигатели — электродвигатели постоянного тока или сервоприводы. Ими очень легко управлять, а для питания достаточно обычной батарейки. Оборудованные ими роботы могут быть автономными.
Другое дело ноги или лапы — их форма, длина, расположение, количество степеней свободы.
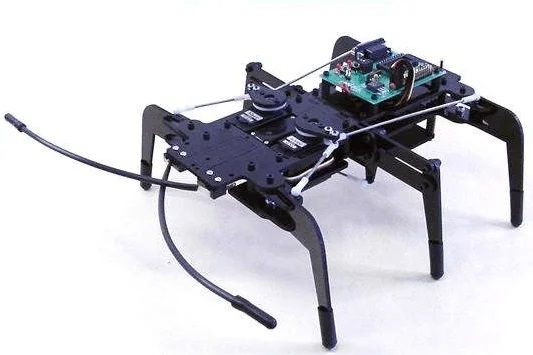
Важным вопросом является соотношение количества приводов к количеству опор. В простейшем случае — шестиногом роботе — мы можем использовать от двух до восемнадцати приводов. Два двигателя связаны с наибольшим ограничением количества возможных аллюров и большим количеством механических связей между ногами. Но во втором случае, если у нас по 3 привода на ногу, то с точки зрения робототехники это решение оптимально.
Примеры шестиногих роботов с двумя, тремя и восемнадцатью степенями свободы показаны на следующих рисунках:
 |
 |
 |
| а) Робот с двумя степенями свободы | б) Робот с тремя степенями свободы | в) Робот с восемнадцатью степенями свободы |
 |
 |
 |
| г) Робот с одной степенью свободы — конструкция ноги | д) Робот с одной степенью свободы — механизм передачи привода | е) Робот с одной степенью свободы — траектория походки |
На рисунке а показан робот с двумя степенями свободы. Механическая связь между ногами по обе стороны от робота позволяет ему двигаться вперед и поворачиваться. Система управления такого робота аналогична системе управления колесного робота с двумя независимо управляемыми колесами.
Робот с таким строением ног может двигаться только одним типом походки. На рисунке б можно увидеть конструкцию робота с тремя степенями свободы. В этом случае средняя пара ног уравновешивает робота так, чтобы две оставшиеся ноги с одной стороны были подняты вверх — они находятся в фазе вытягивания. При наклоне в другом направлении стороны меняются местами. Как видно на рисунке, внешние ноги с обеих сторон жестко соединены. Опять же, возможен только один тип движения, но он немного сложнее, чем в предыдущем случае.
Последний пример — робот с несколькими степенями свободы (рисунок в). Такое решение дает возможность независимо управлять подъемом и горизонтальным перемещением каждой ноги.
В случае 2 степеней свободы на ногу, один привод отвечает за вертикальное движение, а другой за горизонтальное. Разница между роботом с 2 степенями свободы на ногу и 3 степенями свободы на ногу в том, что в последнем случае можно двигаться боком (по типу краба). В первом поступательное движение может происходить только вперед или назад. В зависимости от запаса энергии приводов такое решение позволяет реализовать статическую походку (с малым запасом мощности) и динамическую походку (с большим запасом мощности).
На рисунках г, е можно увидеть роботов с одной степенью свободы. Конструкция ног идентична конструкции робота с двумя степенями свободы. Отличие заключается в конструкции трансмиссии и замене одного двигателя муфтой свободного хода, передающей вращение только в одном направлении.
Такое решение ограничивает возможные движения для ходьбы вперед и поворота в сторону ( рисунок е).
Расположение ног
Также немаловажным является размещение ног на теле робота. Чтобы робот не упал, надо помнить о положении центра тяжести. Это очень важно.
| Чтобы робот оставался устойчивым, его центр тяжести должен находиться внутри многоугольника опоры робота. |
Опорный многоугольник — это многоугольник, вершинами которого являются точки, в которых ноги фактически соприкасаются с землей. Эта цифра меняется в каждый момент движения. Например, для четвероногого робота с симметрично распределенными ногами, когда все ноги соприкасаются с землей, опорный многоугольник представляет собой прямоугольник или квадрат; если одна нога поднята — многоугольник опоры становится треугольником.
При проектировании робота, который будет двигаться в статически стабильном движении, центр тяжести должен быть расположен таким образом, чтобы он никогда не выходил за пределы многоугольника. Чтобы повысить устойчивость и исключить влияние всех дополнительных динамических эффектов (например, сам факт движения ноги), применяется дополнительный запас прочности. Он заключается в построении ног и корпуса, при котором центр тяжести не приближается к сторонам многоугольника опоры.
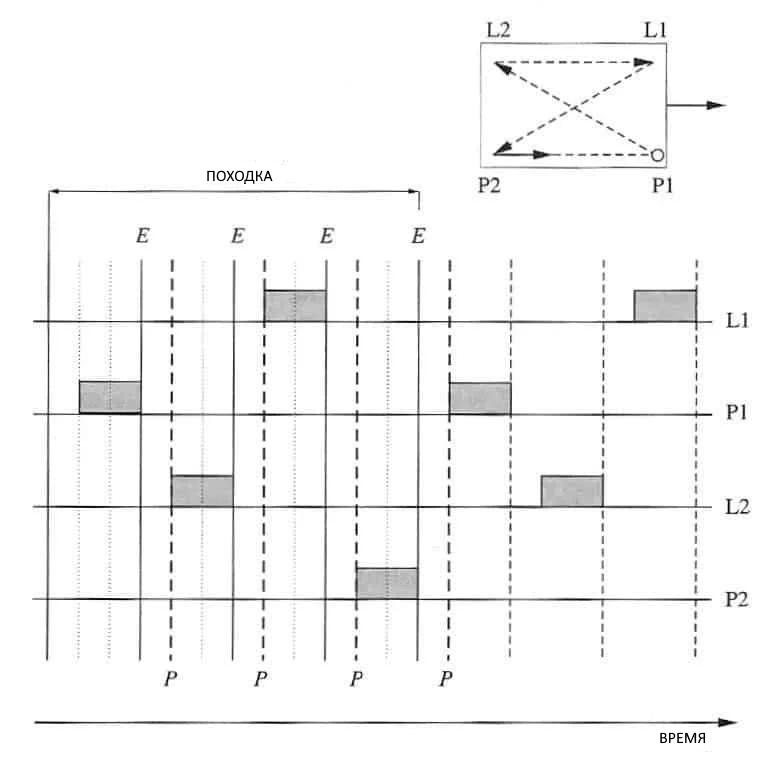
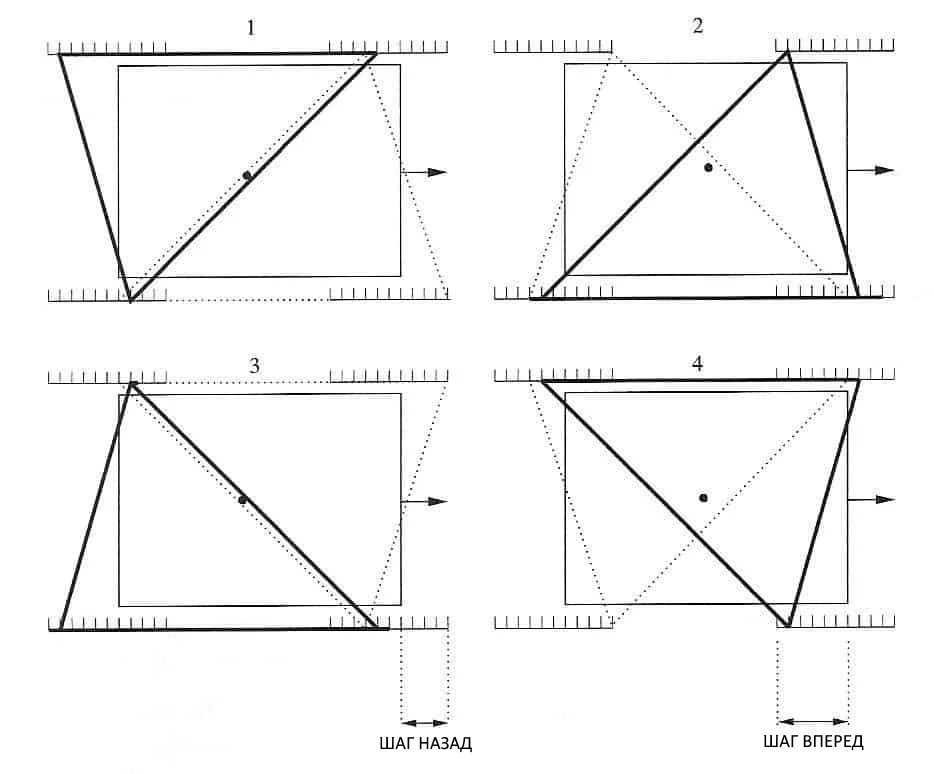
Минимальное расстояние между ближайшей стороной текущего опорного полигона и центром тяжести называется статическим запасом устойчивости. Фигура, на следующем рисунке, показывает примерную последовательность опорных полигонов во время движения четвероногим роботом. На этом рисунке также показан центр тяжести робота.
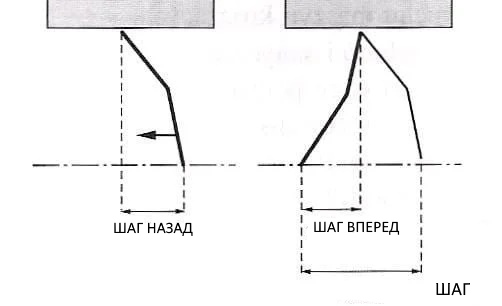
Понятие шага связано с положением ноги по отношению к туловищу робота. Это показано на следующем рисунке:
Диаграммы походки
Наконец, мы хотели бы вернуться к вопросам схемы походки. Это не будет проблемой для роботов, которые могут двигаться только одним типом походки. Однако при разработке алгоритма походки робота с большим количеством степеней свободы, существует некоторая проблема.
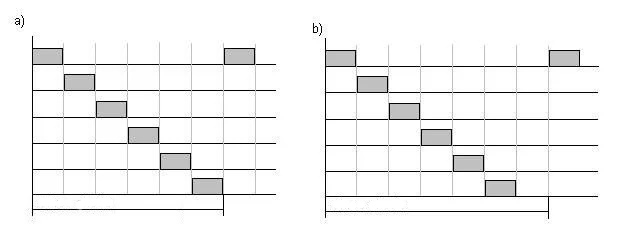
Мы представили эту проблему на следующем рисунке а виде диаграммы. Существенным различием между двумя представленными вариантами является дополнительное пустое поле в периоде походки. В этот момент все ноги находятся на земле, а туловище выталкивается вперед на всю длину шага. Во время фазы стояния на одной ноге, другие движутся в обратном направлении 1/5 длины шага.
Системы управления — отдельная проблема. Простое перемещение даже роботов со многими степенями свободы и поддержкой нескольких простых датчиков расстояния может быть реализовано в восьмиразрядных микроконтроллерах. Написание программы на языках BASIC (bascom, BASIC stamp, BASIC micro) также не является большой проблемой для среднего опытного программиста.
Вывод
В данной статье «Шагающие роботы — теория и основы» рассмотрены вопросы, связанные с шагающими роботами, наиболее часто используемыми решениями для реализации походки, и описаны примерные диаграммы походки. Описание всех возможных конструкций ног и методов походки просто невозможно из-за огромного объема информации.
Надеемся, материал вам понравился. Не стесняйтесь узнавать больше о робототехнике, изобретать и конструировать собственных шагающих роботов. Конструкция такого робота доставит вам большое удовлетворение и гордость за себя, особенно когда заработает все как надо.
С Уважением, МониторБанк