Согласование датчиков зрения с ROS
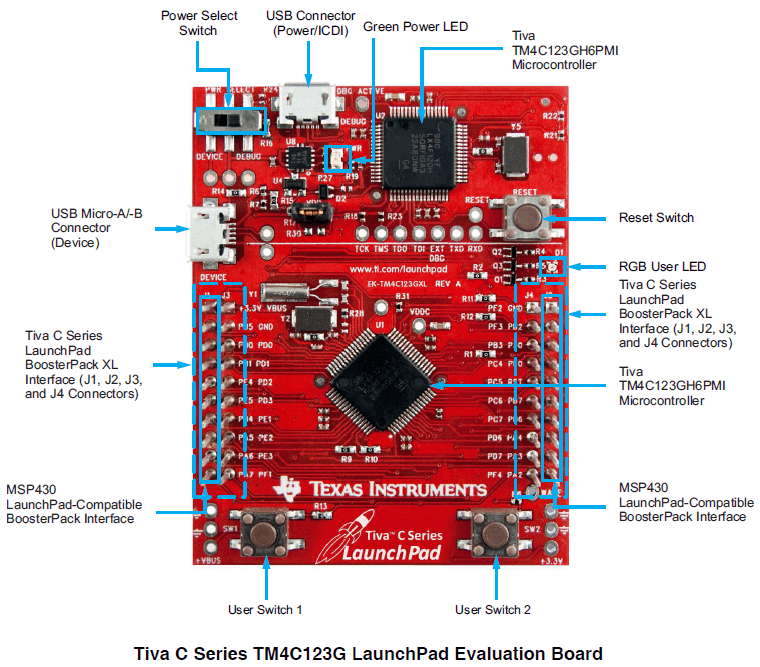
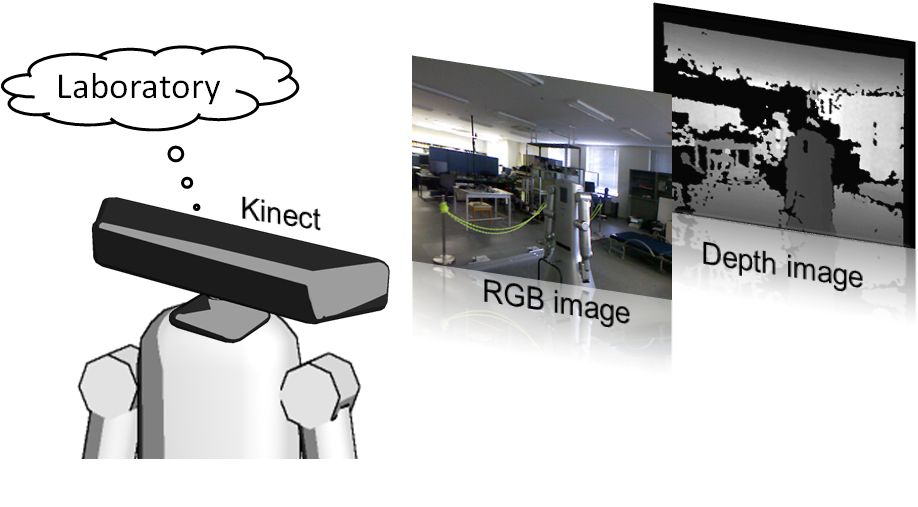 В предыдущей статье «Согласование приводов и датчиков с контроллером робота» мы рассматривали некоторые роботизированные датчики, используемые в нашем роботе, и их взаимодействие с микроконтроллером LaunchPad. Основная тема этой статьи – датчики машинного зрения и их интерфейс. (далее…)
В предыдущей статье «Согласование приводов и датчиков с контроллером робота» мы рассматривали некоторые роботизированные датчики, используемые в нашем роботе, и их взаимодействие с микроконтроллером LaunchPad. Основная тема этой статьи – датчики машинного зрения и их интерфейс. (далее…)
 В предыдущей статье «
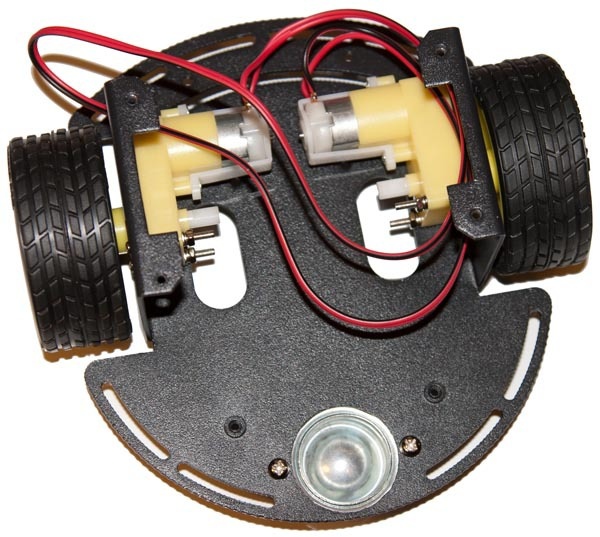
В предыдущей статье « В этой статье мы обсудим конструкцию, принципы работы оборудования ChefBot и выбор аппаратных компонентов. В предыдущей статье «
В этой статье мы обсудим конструкцию, принципы работы оборудования ChefBot и выбор аппаратных компонентов. В предыдущей статье «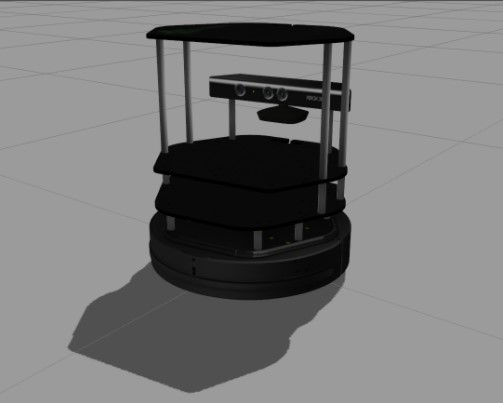
 В этой статье мы рассмотрим модель робота с дифференциальным приводом и создадим URDF-модель робота в ROS. URDF – это универсальный формат XML-файла, используемый для описания всех элементов робота в ROS.
В этой статье мы рассмотрим модель робота с дифференциальным приводом и создадим URDF-модель робота в ROS. URDF – это универсальный формат XML-файла, используемый для описания всех элементов робота в ROS.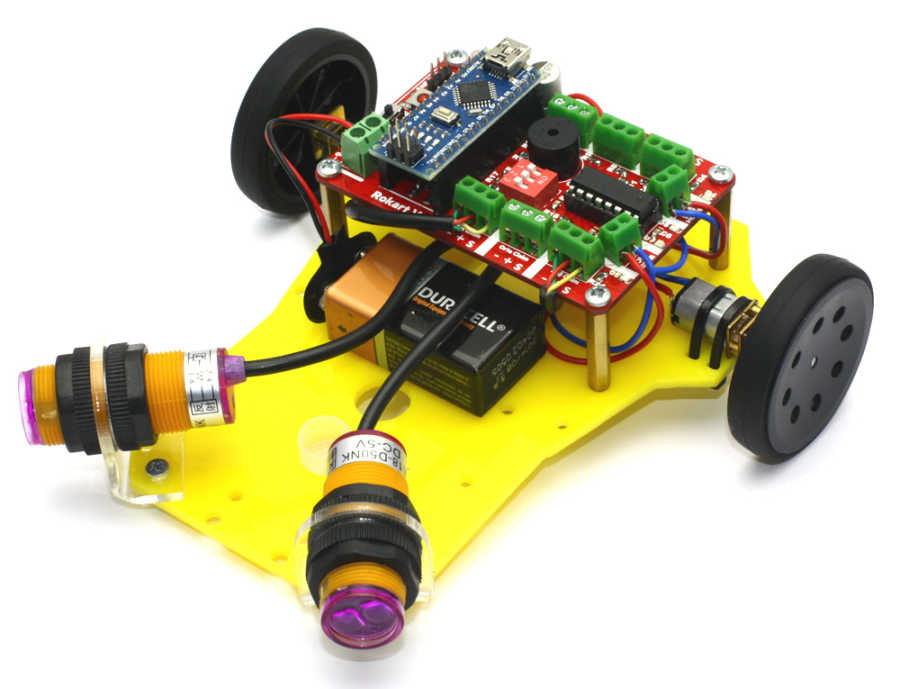 В предыдущей статье «
В предыдущей статье « Основная цель данной серии статей – помочь вам создать автономный мобильный
Основная цель данной серии статей – помочь вам создать автономный мобильный