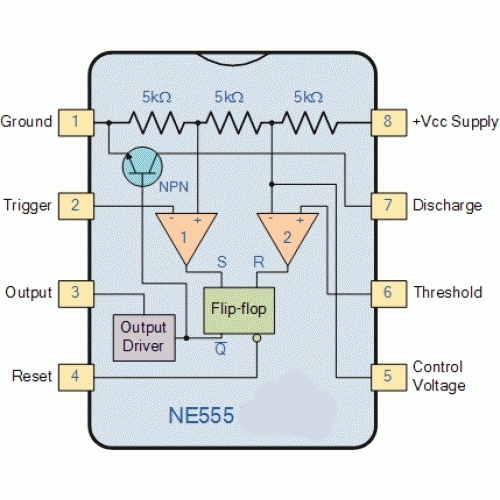
 В предыдущей статье мы обсуждали принцип работы небольшой, но чрезвычайно важной и распространенной микросхемы NE555.
В предыдущей статье мы обсуждали принцип работы небольшой, но чрезвычайно важной и распространенной микросхемы NE555.
Пришло время для практических занятий, т.е. для упражнений. В рамках этой статьи мы создадим и смоделируем схему для работы сервопривода, а также схему работы датчика расстояния.
Как вы, наверное, помните из предыдущей статьи, изменение значения отдельных элементов NE555 влияет на его производительность. При выполнении упражнений мы будем использовать разные (иногда странные) значения резисторов и конденсаторов, чтобы добиться желаемой работы микросхемы NE555. Мы не брали эти значения «с потолка», мы просто все рассчитали.
| Вначале остановимся на построении схем, а потом вернемся к расчетам. |
Датчик препятствий на NE555
Этот проект призван продемонстрировать NE555 в ее типичной работе. Роль данной микросхемы будет заключаться в генерации сигнала, контролирующего работу ИК-диода. В одной из предыдущих статей мы использовали встроенный инфракрасный приемник TSOP для создания тестера дистанционного управления RTV. Но в этот раз, мы обойдемся без пульта ДУ, т.к. инфракрасный передатчик мы построим сами.
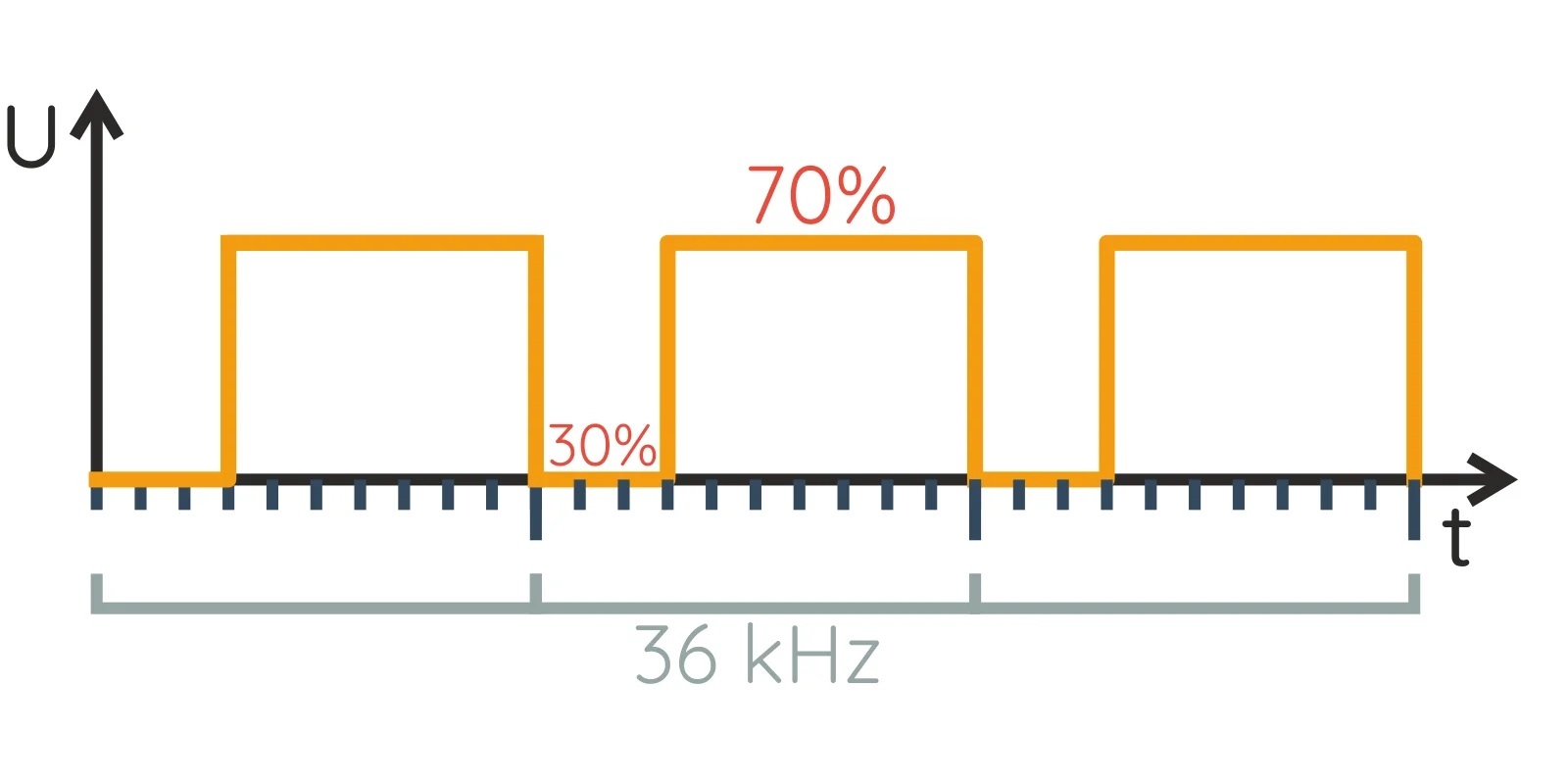
Хорошо, но какое это имеет отношение к датчику препятствий? Диод, управляемый нашей схемой, будет постоянно светиться в инфракрасном диапазоне, но не будет работать постоянно. Это будет сигнал, модулированный с частотой 36 кГц, то есть тот, который обнаруживается нашим TSOP.
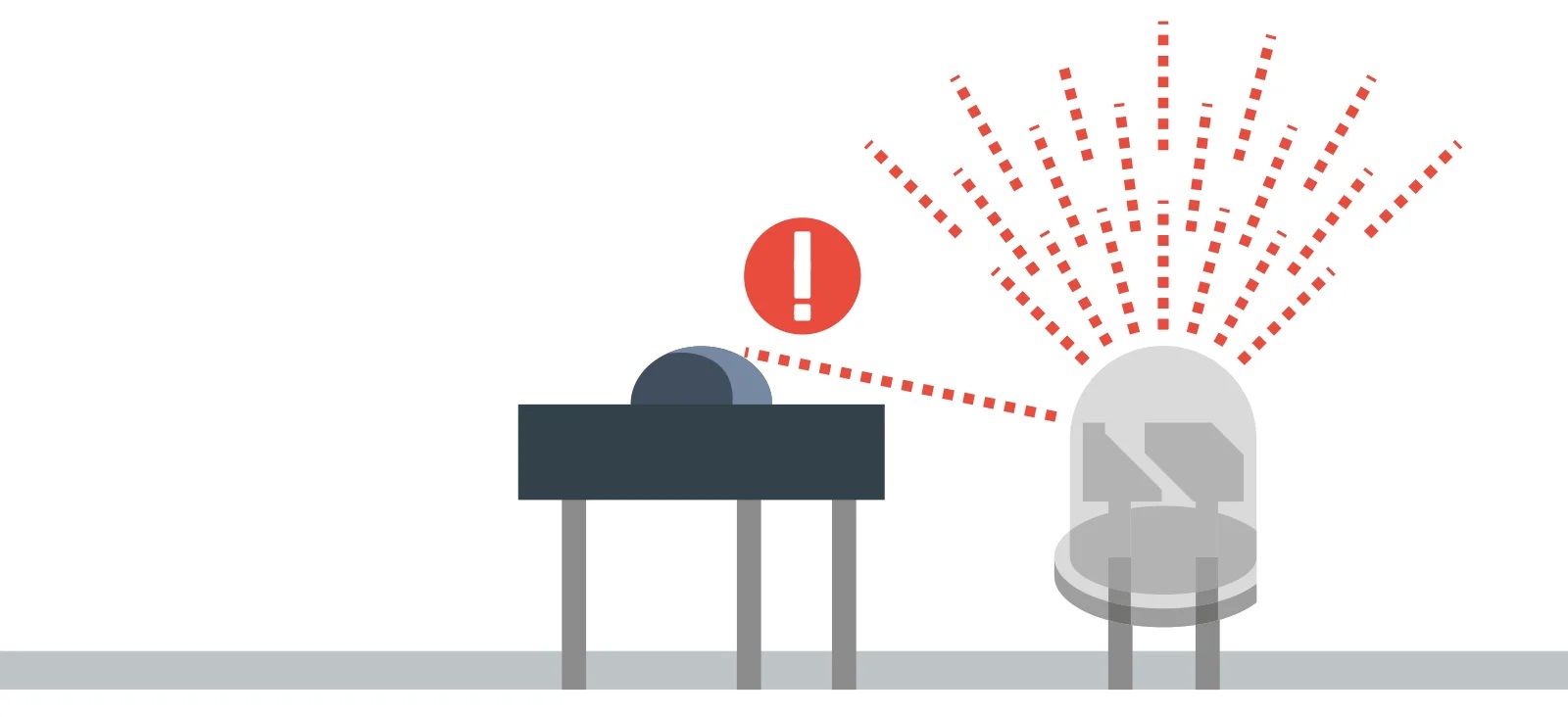
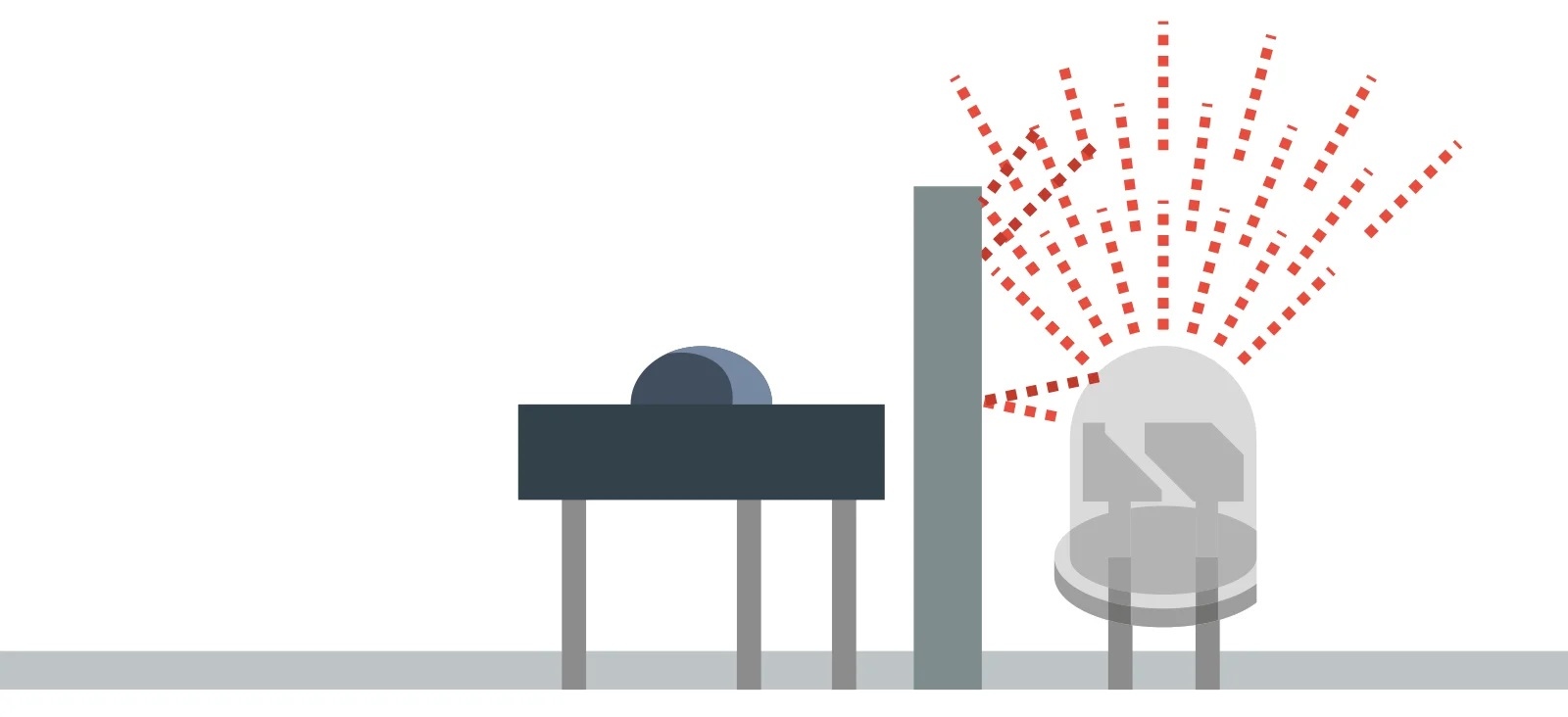
Поэтому разместим TSOP и ИК-диод рядом друг с другом. Если перед этой парой есть препятствие, свет, излучаемый диодом, будет отражаться от объекта и попадать в приемник — благодаря чему мы сможем обнаружить препятствие. Так что мы построим настоящий датчик препятствий!
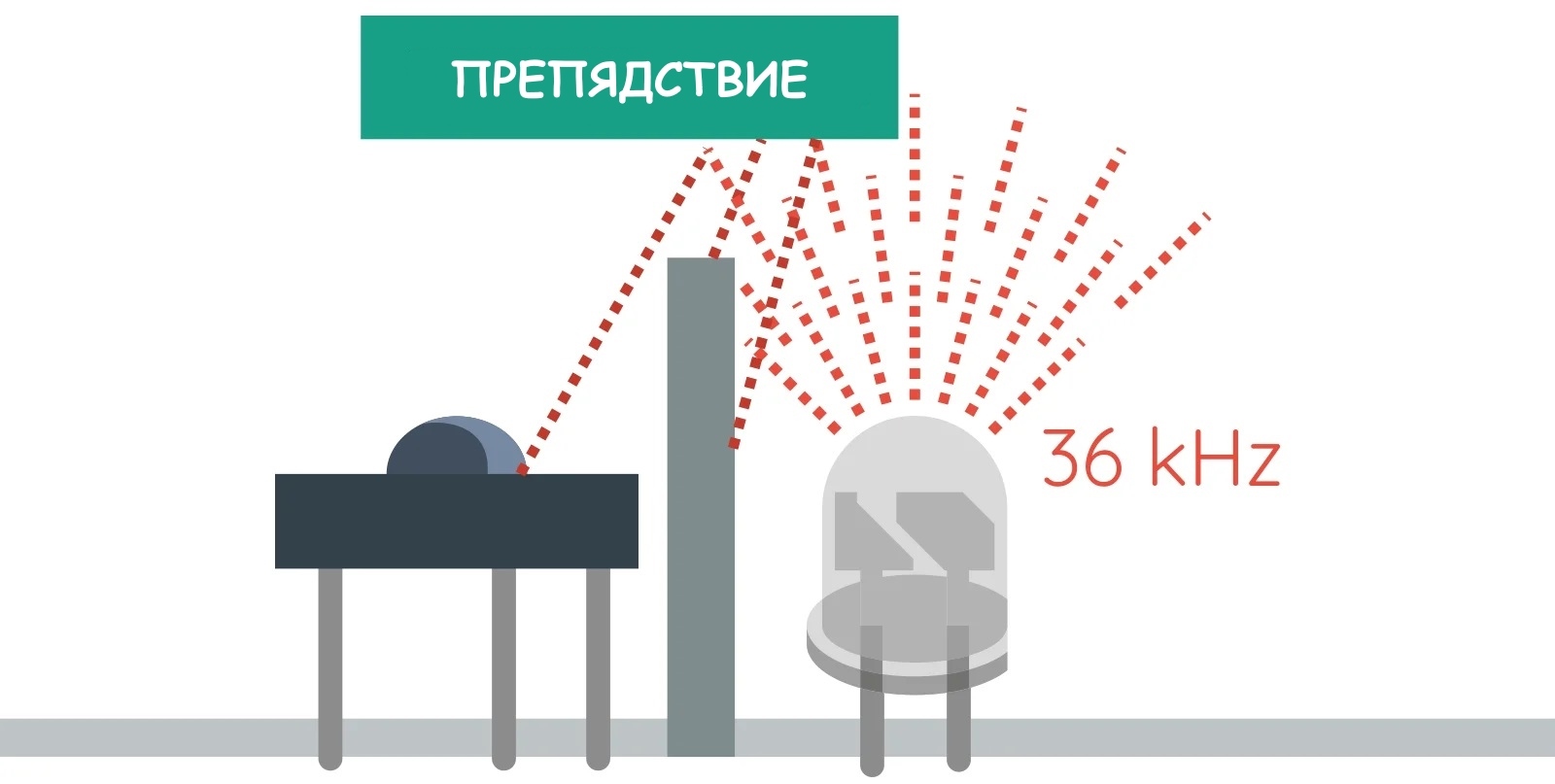
Приведенная выше иллюстрация представляет собой лишь представление о работе такого датчика. На самом деле его поле зрения будет немного другим. Но мы проверим это на практике, потом также объясним, что это за серая стена между передатчиком и приемником.
Элементы, необходимые для выполнения этого упражнения:
- 1 × инфракрасный приемник TSOP31236,
- 1 × микросхема NE555,
- Резистор 1 × 10 кОм,
- Резистор 3 × 1 кОм,
- Резистор 1 × 100 Ом,
- Резистор 3 × 330 Ом,
- 2 × 220 мкФ конденсатор,
- Конденсатор 3 × 100 нФ,
- Конденсатор 1 × 10 нФ,
- 1 × 1N4148 диод,
- 1 × светодиод (выберите свой любимый цвет),
- 1 × ИК-светодиод (инфракрасный),
- Батарея 4 × AA,
- 1 × корзина для 4 батареек АА,
- 1 × контактная пластина,
- Комплект соединительных проводов.
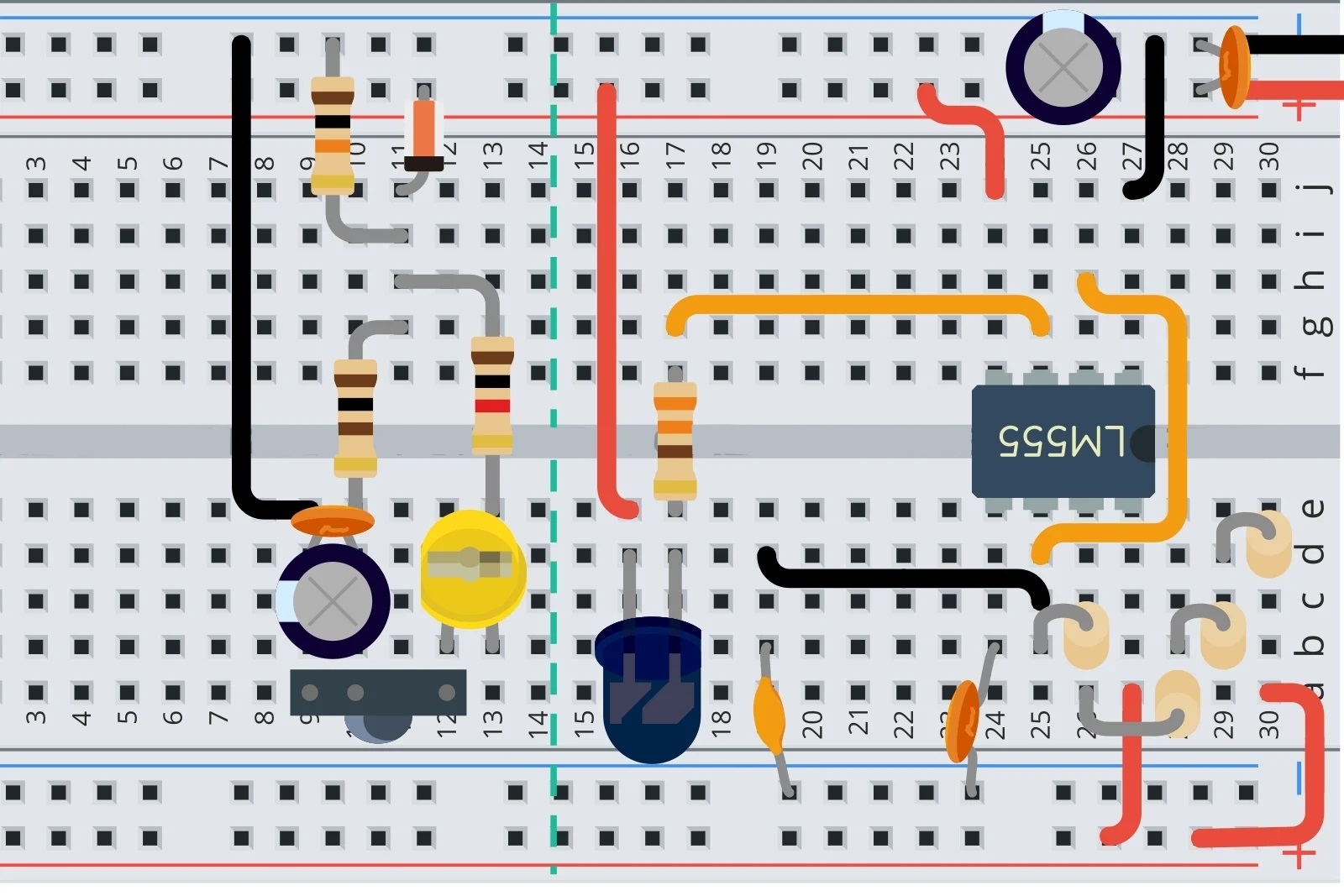
Схема датчика препятствий
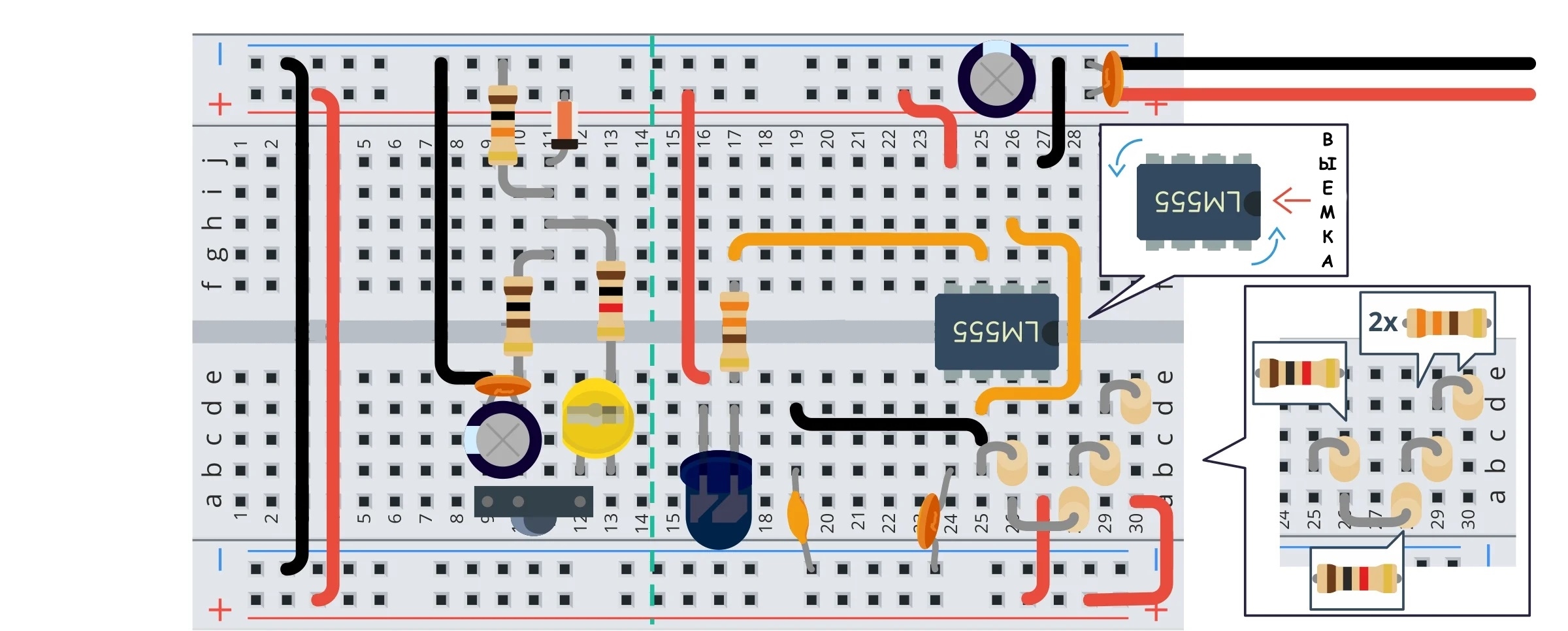
Схема довольно большая, но самое главное, что мы уже знаем все элементы, используемые здесь из предыдущих статей. Теперь применим полученные знания на практике — прежде чем мы перейдем к сборке, стоит обратить внимание на несколько моментов, которые описаны под схемой.
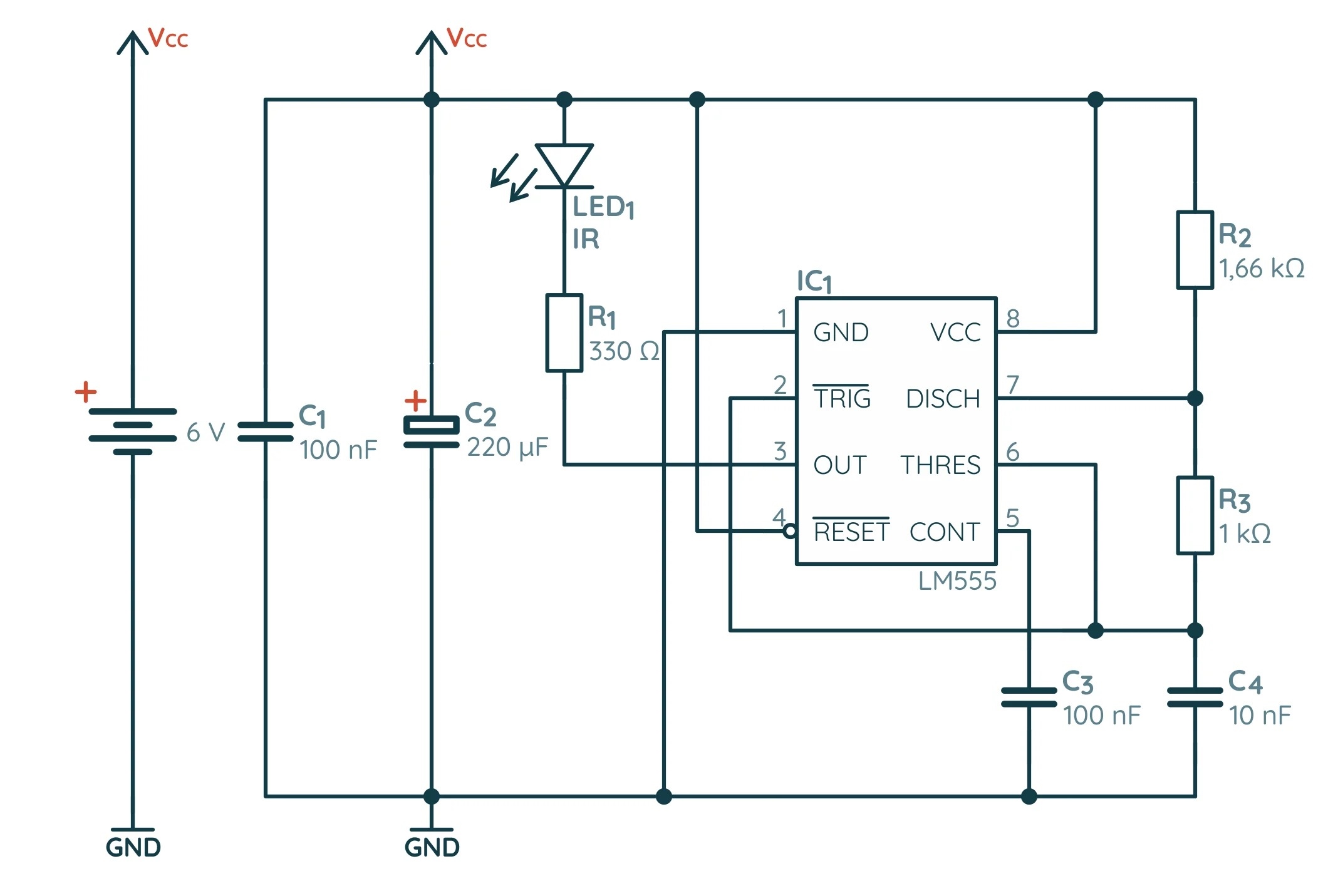
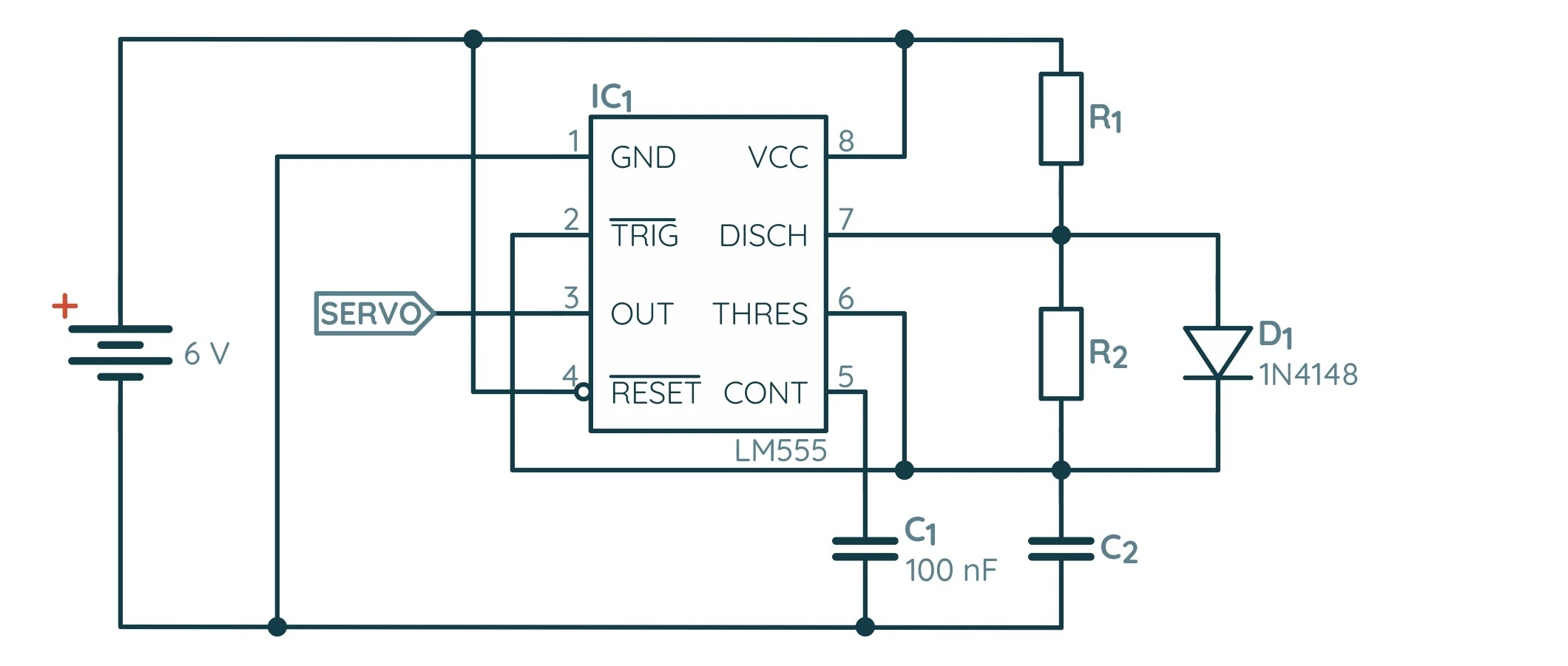
Иногда, относительно большие и сложные схемы, делятся на несколько более мелких частей. Это могут быть четко разделенные блоки в одном файле или полностью отдельные схемы. В данном случае, чтобы показать вам такую ситуацию, мы разделили наш датчик на две отдельные схемы (одна показывает передатчик, а другая — приемник). На практике, всю схему мы соберем на одной макетной плате.
Конденсаторы C1 и C2 фильтруют мощность NE555. Резистор R1 ограничивает ток передающего диода IR примерно до 13 мА. Немного, но для первых тестов хватит. Элементы R2, R3 и C4 нужны для того, чтобы микросхема NE555 генерировала сигнал с частотой около 36 кГц и скважностью (отношение периода следования (повторения) импульсов к длительности импульса) около 70%.
| Это означает, что диод, соединенный анодом с положительным полюсом источника питания, будет мигать только 30% времени, а выключен будет 70%. |
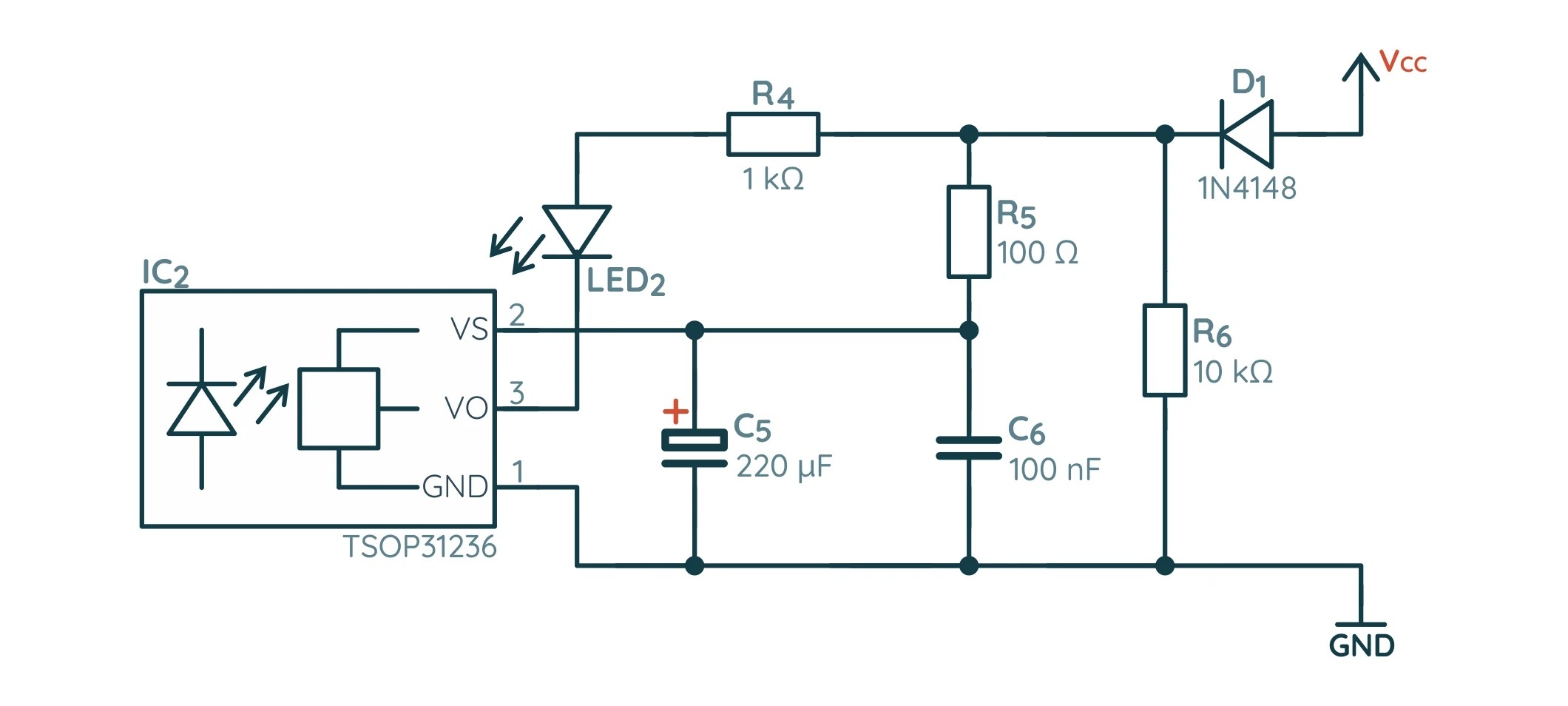
Приемник TSOP31236 уже использовался для тестирования пультов дистанционного управления RTV. Здесь он используется точно так же. Разница в том, что диод LED2, подключенный к его выходу, будет постоянно светиться при приближении к препятствию. Инфракрасный сигнал будет непрерывным, то есть мы будем посылать импульсы с рабочим циклом 30% все время.
Важно отметить, что нам не нужно беспокоиться о том, что наш ТСОП не будет генерировать точную частоту 36 кГц. Как мы уже упоминали, знакомясь с TSOP, фильтр, содержащийся в этом приемнике, не идеален и также пропускает сигналы других частот.
Установка и пуско-наладка датчика препятствий
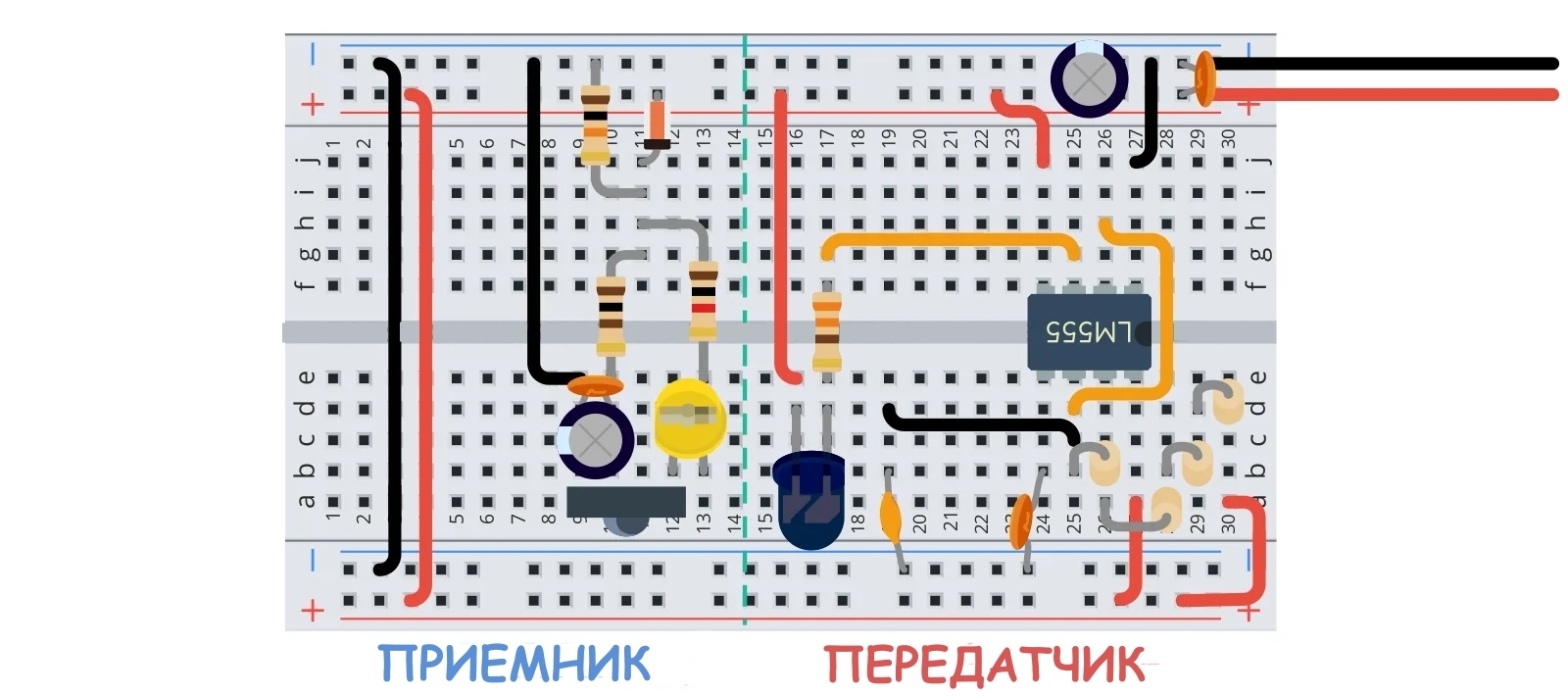
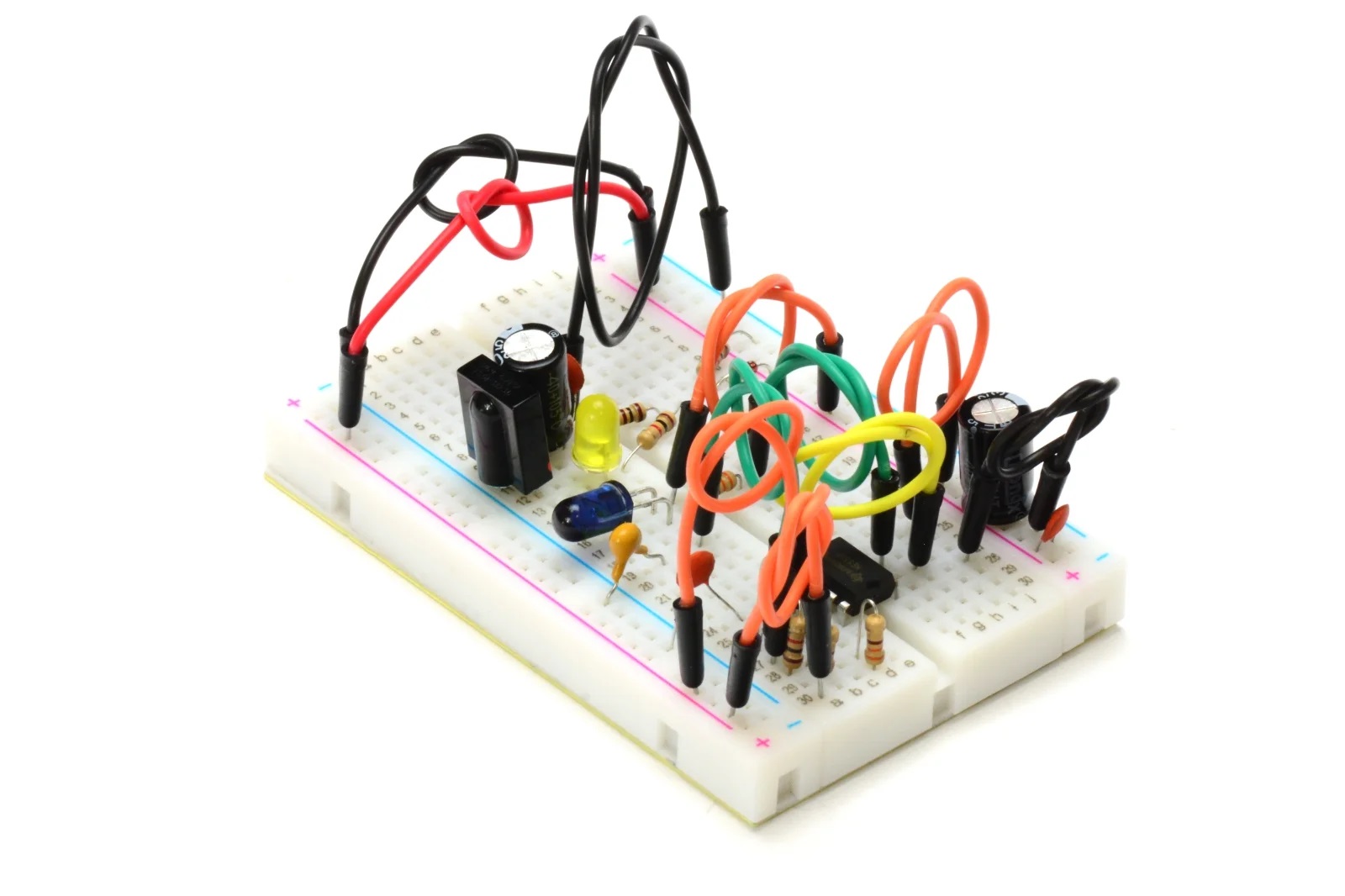
Схему можно удачно собрать даже на небольшой макетной плате. Пример этого показан ниже. Конечно, вы можете попробовать создать такую схему самостоятельно, но, поскольку все выглядит довольно запутанно, мы подробно описали весь процесс ниже.
Этот проект четко разделен на два блока:
- генератор на NE555, управляющий ИК-диодом,
- инфракрасный приемник на базе датчика TSOP.
Начнем с создания генератора на базе NE555.
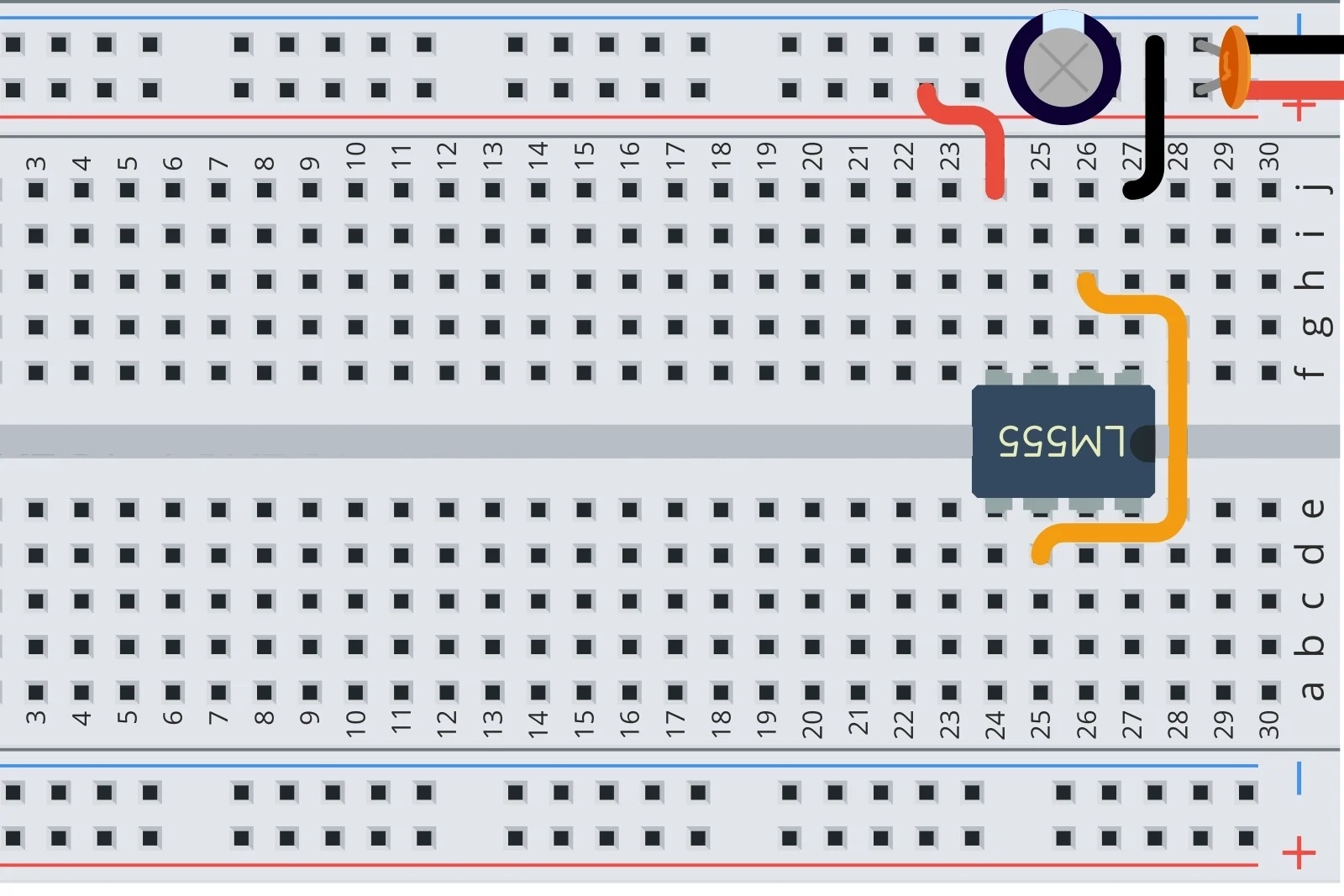
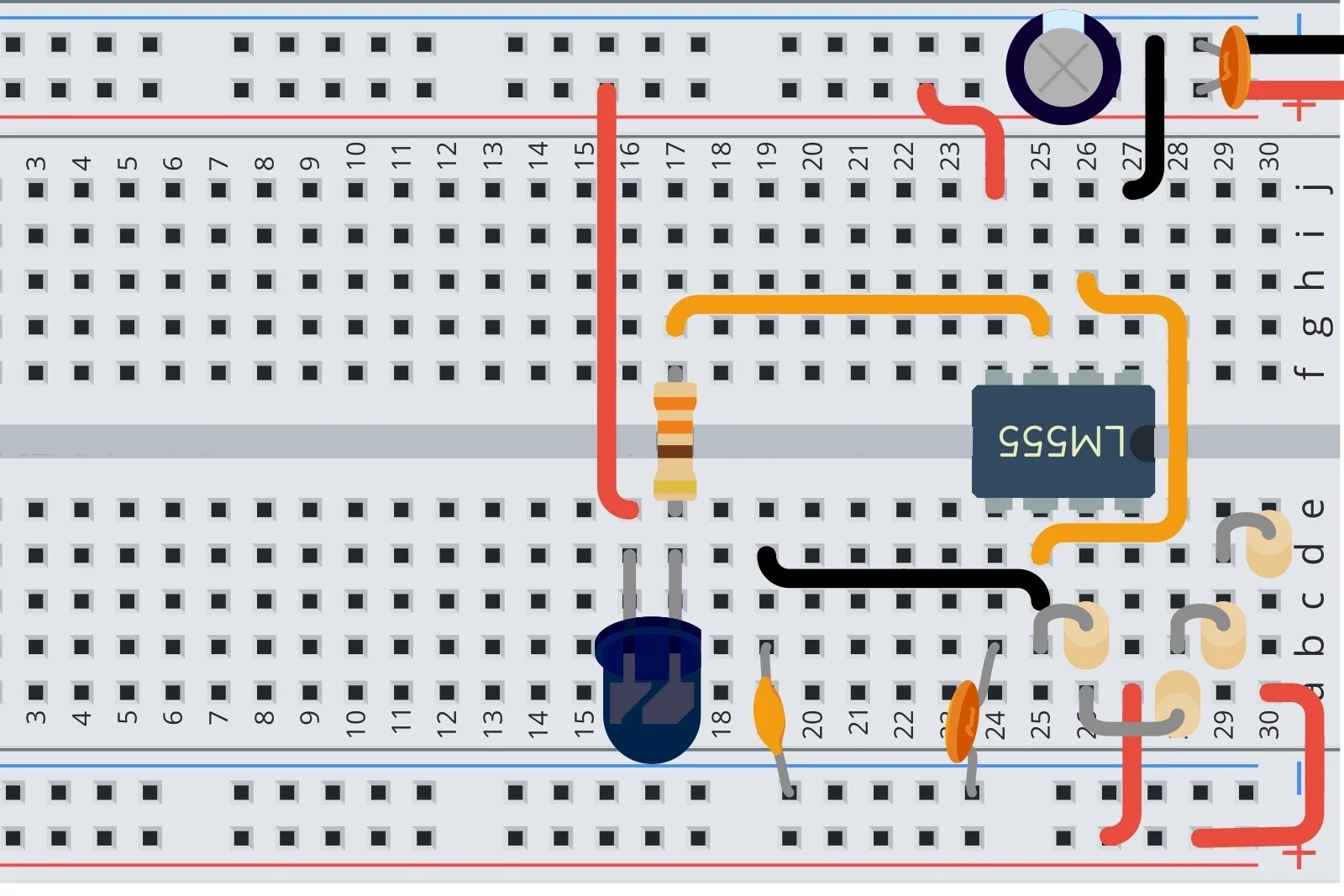
Шаг 1. Установите два конденсатора фильтра блока питания (C1 и C2). Конечно, пора и микросхему NE555 вставить в макетную плату. На этот раз не посередине, а ближе к правому краю, потому что тогда мы сможем лучше уместить всю схему на такой маленькой макетной плате!
Шаг 2. Подключите первый контакт NE555 к земле, а четвертый контакт к положительной шине питания.
 |
 |
| Шаг 1: конденсаторы и NE555 | Шаг 2: Подключение питания NE555 |
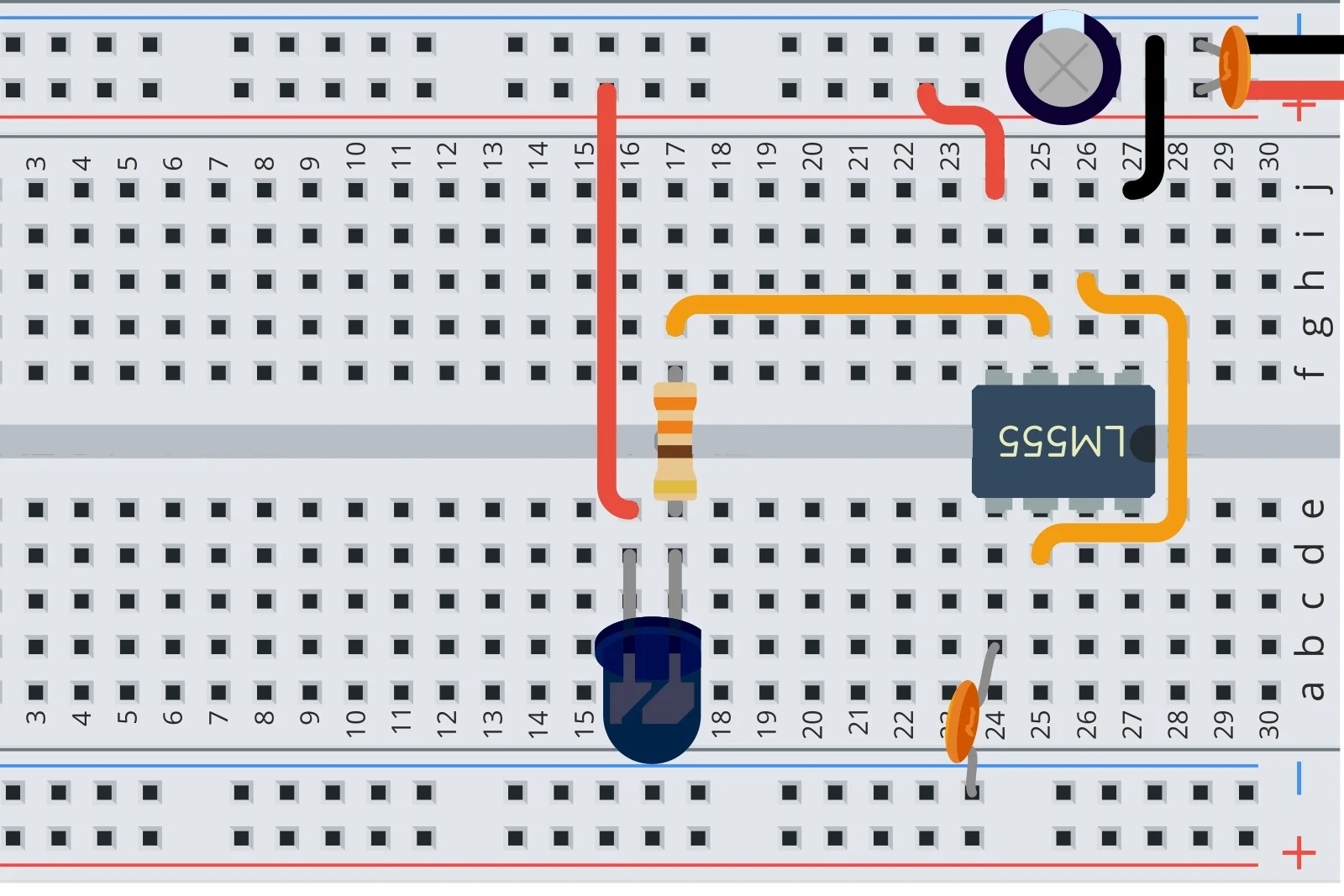
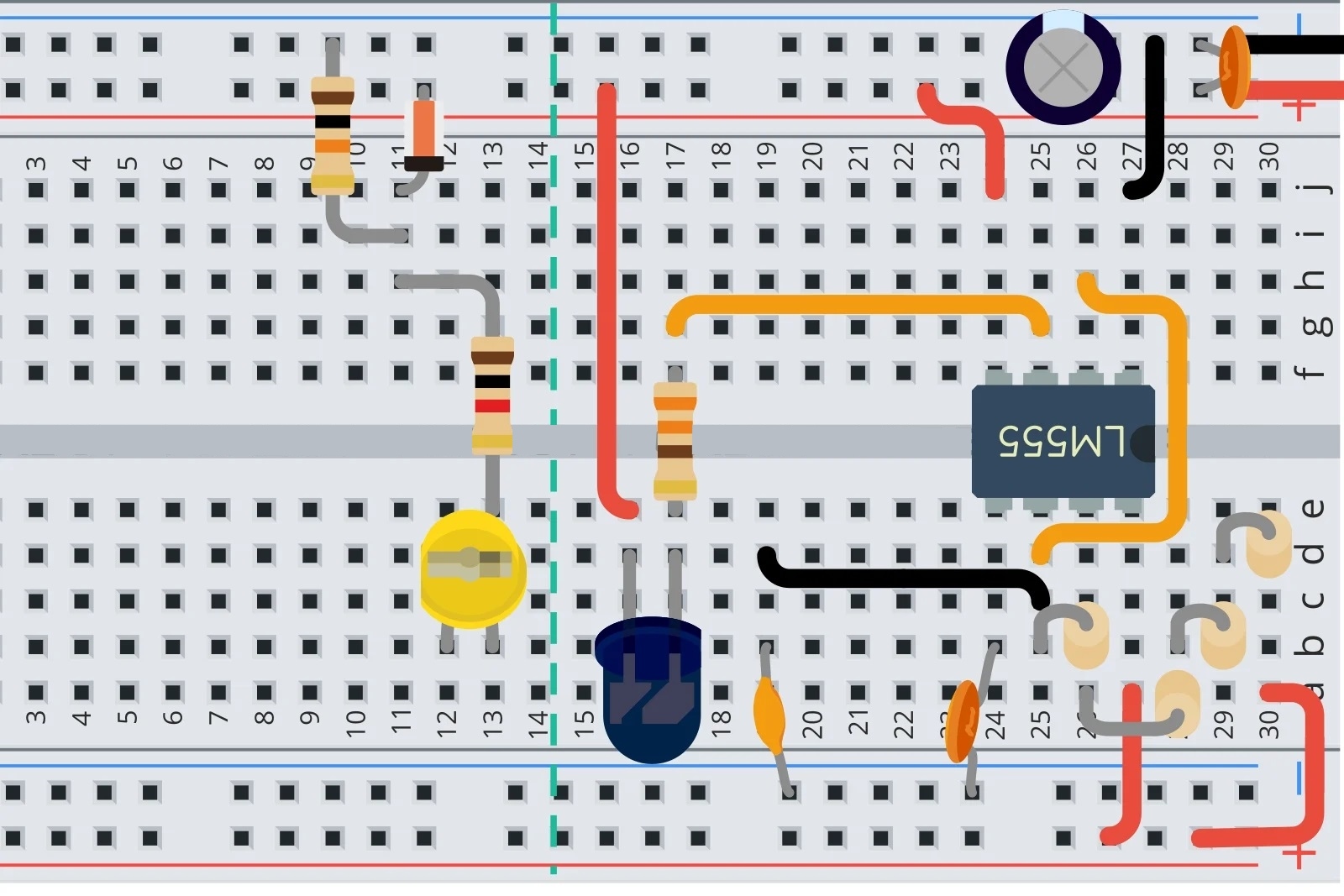
Шаг 3. Соединяем вторую ножку (вывод) с шестой.
Шаг 4. Подключаем передающий диод (ИК) к третьему выводу через R1 (330 R).
| У вас может быть другой ИК-диод (диаметром 3 или 5 мм и с темной или прозрачной линзой). Однако это не сказывается отрицательно на работе схемы. |
 |
 |
| Шаг 3: соединение ножек NE555 | Шаг 4: Подключение ИК-диода |
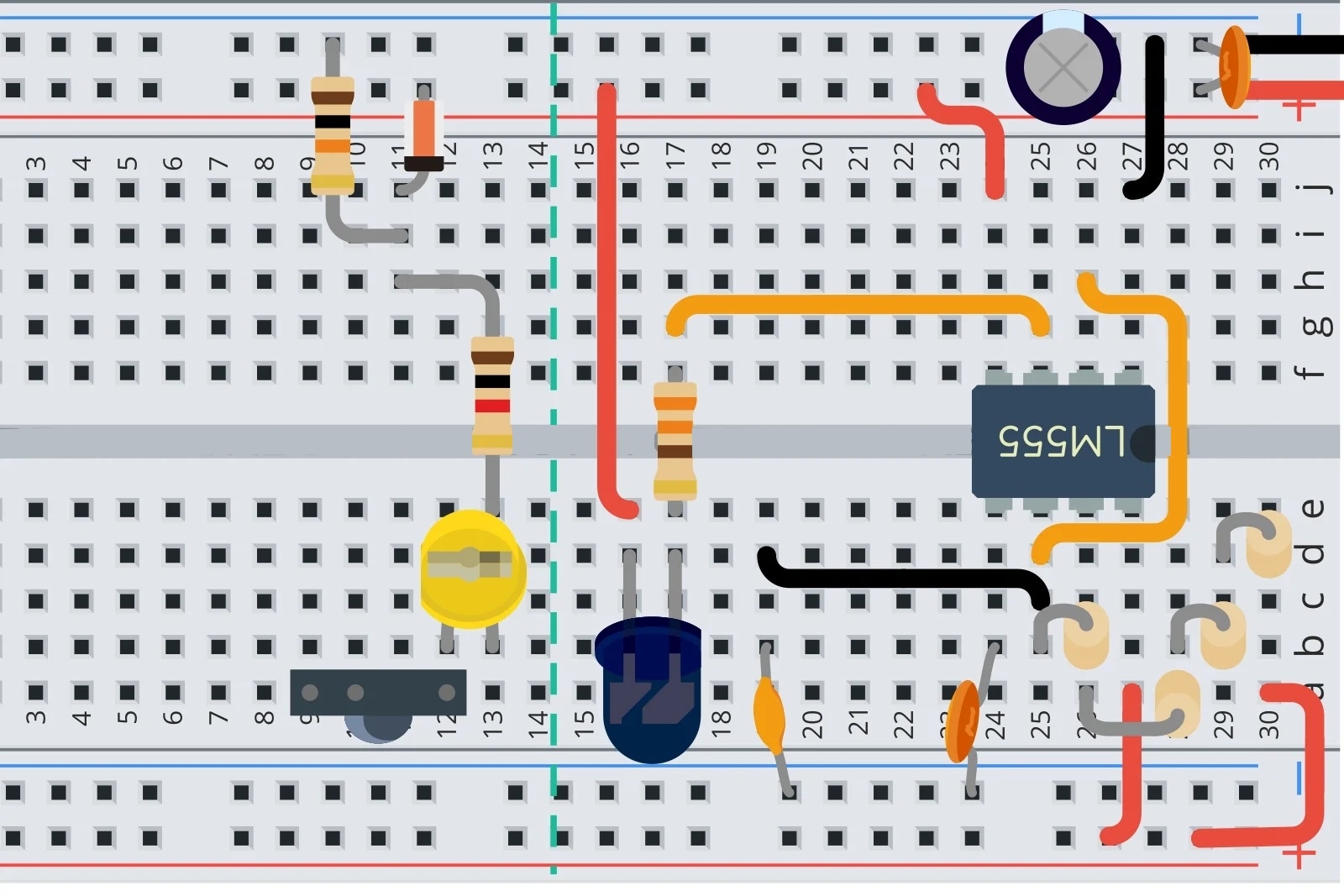
Шаг 5. Подключите питание к диоду. Мы подключаем пятую ножку NE555 к земле через C3.
Шаг 6. Добавляем конденсатор С4 и резистор R3. Соединяем их ножками 6 и 7 соответственно.
 |
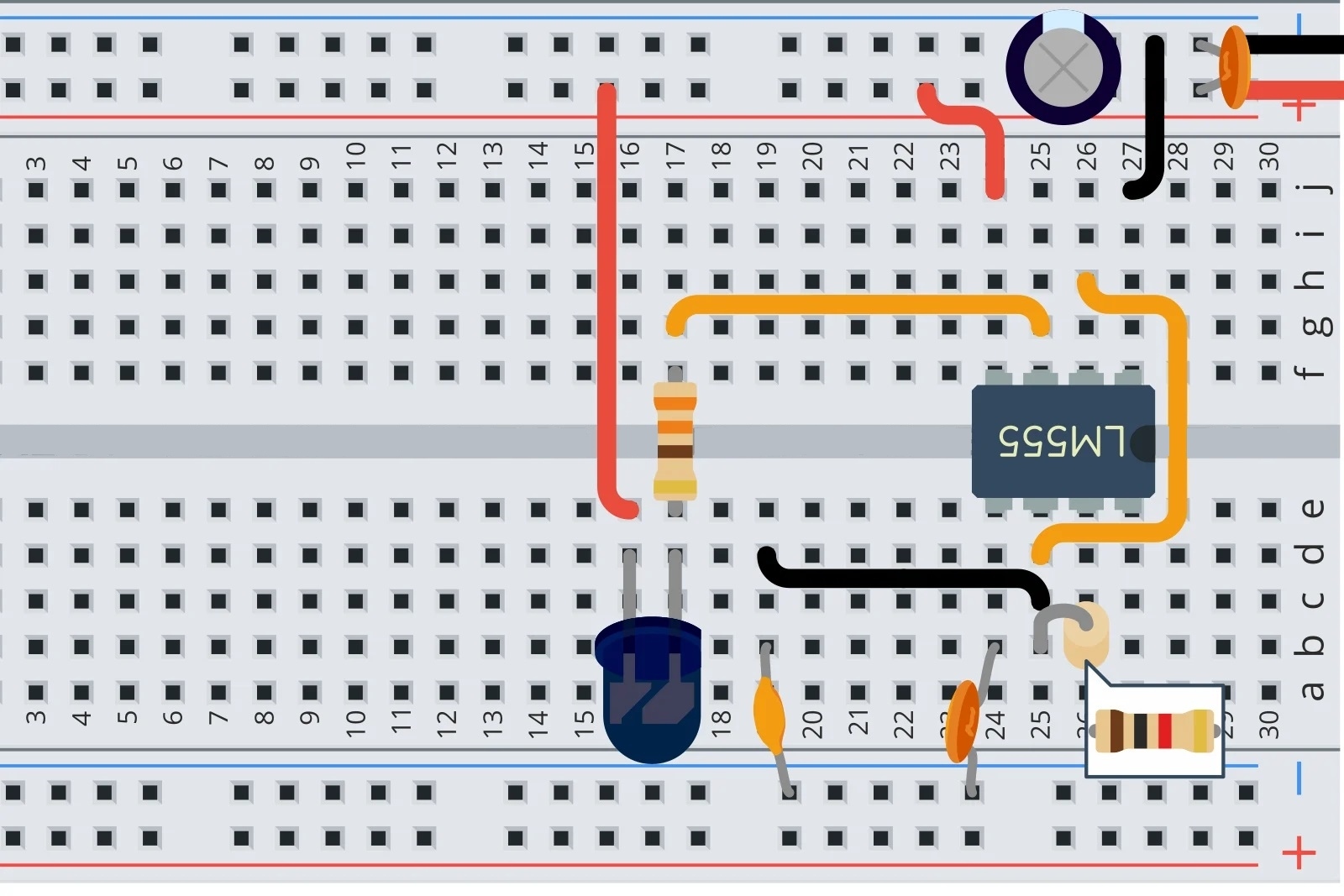 |
| Шаг 5: диодный источник питания и конденсатор | Шаг 6: дополнительные элементы и соединения |
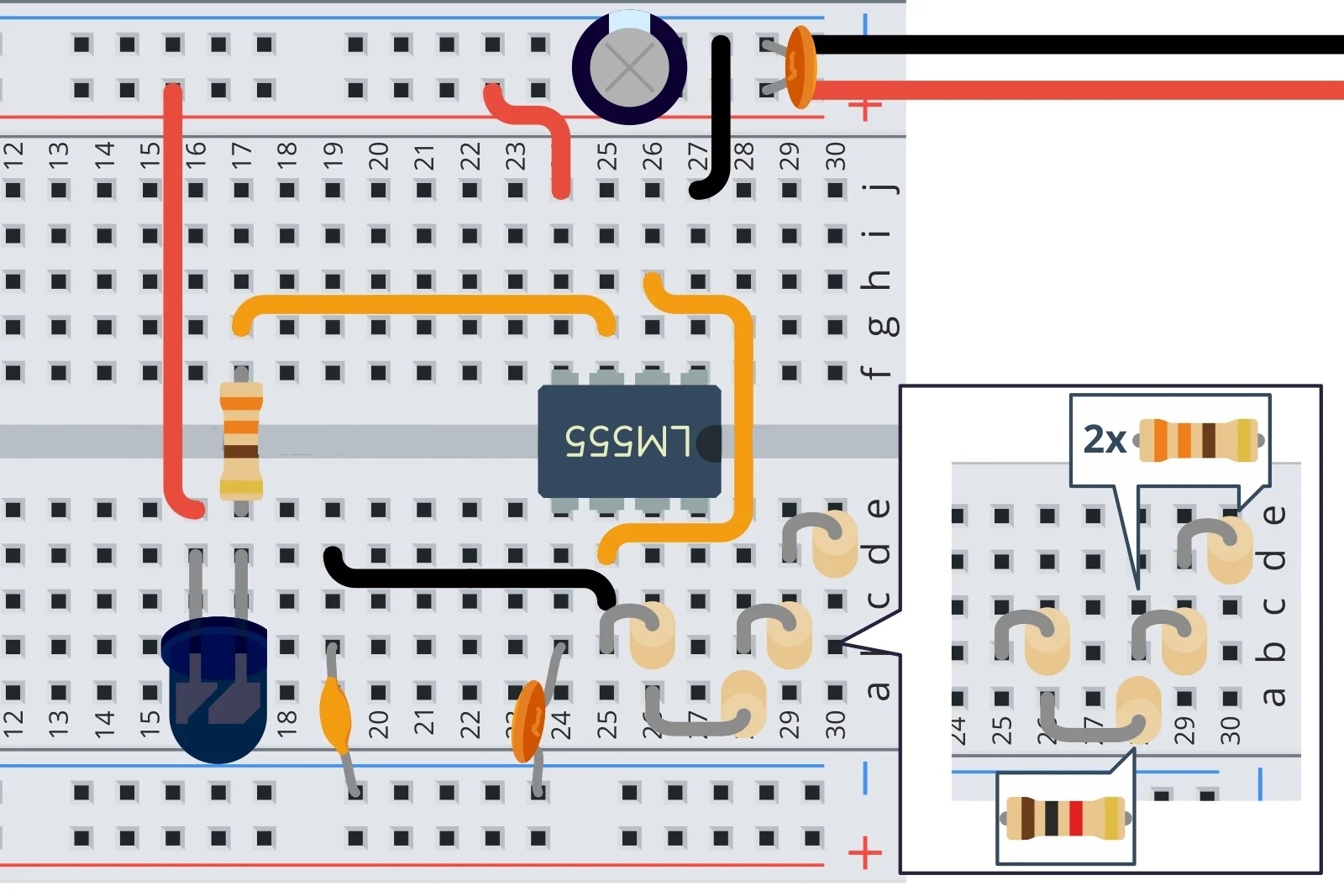
Шаг 7. Пора добавить резистор R2 номиналом 1,66 кОм. Сразу стоит сказать, что такого резистора нет и придется сделать его самостоятельно, объединив несколько других. Как видно на фото, требуется 3 последовательно включенных резистора. Какие значения использовать? Решайте сами!
Шаг 8. Подключите питание к восьмой ножке NE555. Мы также подключаем вывод нашего нового резистора 1,66 кОм к положительной шине питания. Передающая часть готова!
 |
 |
| Шаг 7: резистор 1,66 кОм | Шаг 8: последующие подключения |
Шаг 9. Пришло время приемника. Подобное задание мы уже выполняли в предыдущих статьях, поэтому здесь мы немного ускоримся. В левом верхнем углу платы размещаем соединение D1, R6 — через эти элементы и резистором R5 запитываем наш приемник. Рядом с передающим диодом готовим место под TSOP. Чтобы датчик работал нормально, он должен находиться рядом со диодом. Также устанавливаем диод с резистором R4.
Шаг 10. Добавим интегрированный инфракрасный приемник TSOP.
 |
 |
| Шаг 9: сборка элементов для TSOP | Шаг 10: ообавьте инфракрасный приемник TSOP |
Шаг 11. Добавляем конденсаторы С5 и С6 и упомянутый резистор R5.
Шаг 12. Подключите массу к конденсаторам.
 |
 |
| Шаг 11: последние 2 конденсатора | Шаг 12: Электропитание и заземление TSOP |
Шаг 13. Подключаем крайние силовые шины макетной платы — датчик готов!
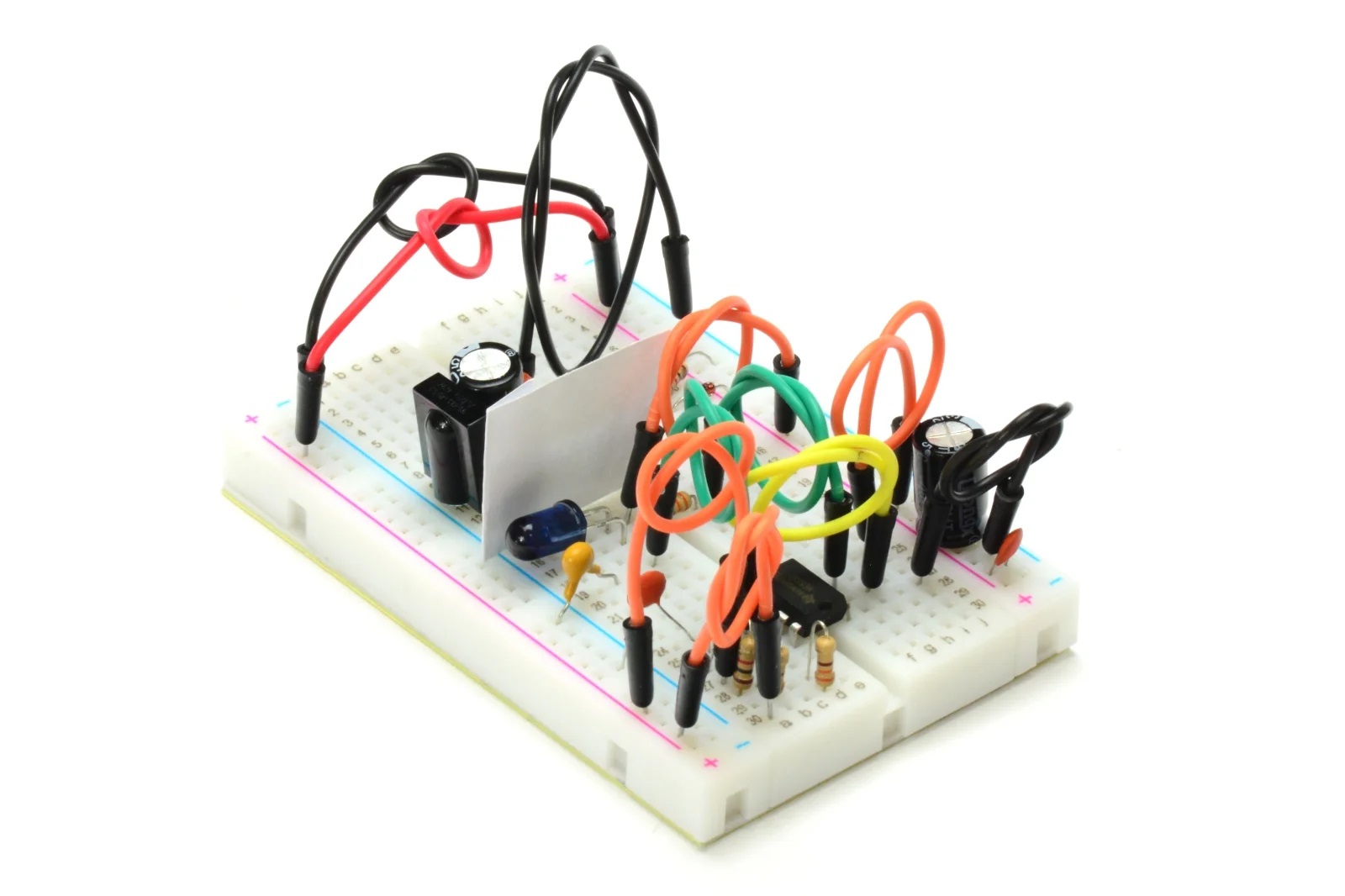
На практике все может выглядеть так (скрученные провода — это нормально).
Работа датчика препятствий
После сборки всего можно включить питание и проверить, правильно ли схема реагирует на приближающиеся объекты. Наш датчик реагировал на крупный план руки с расстояния около 7 см. Проверьте, как это выглядит в вашем случае. Для увеличения дальности действия датчика, можно увеличить ток ИК-диода — здесь можно поэкспериментировать самостоятельно.
| Слишком высокий ток может повредить передающий ИК-диод! |
Что делать, если схема не работает должным образом?
Может случиться так, что, например, датчик постоянно сигнализирует о наличии препятствия. Почему это происходит? Если разместить на плате параллельно передающий диод и ИК-приемник, может показаться, что свет между ними должен передаваться только путем отражения от объекта впереди. При более высоких токах часть излучения будет выходить со стороны диода и достигать приемника напрямую.
Конечно, такое явление полностью нарушит работу датчика, ведь он будет постоянно сигнализировать о наличии препятствия. Так что вам может понадобиться дополнительная перегородка (например, картонная), которая была отмечена на предыдущем рисунке. Добавление такой стены повысит надежность датчика.
Если после сборки схемы и включения питания ничего не происходит, проверьте работу обеих частей по отдельности. Для проверки ресивера пригодится пульт от телевизора. Нажатие кнопки на пульте дистанционного управления должно активировать светодиод рядом с TSOP. В свою очередь, для проверки передатчика лучше всего использовать цифровую камеру (например, с телефона). Если мы наведем камеру на включенную схему, мы должны увидеть, что ИК-светодиод горит фиолетовым светом.
Если какой-либо из компонентов схемы не работает, проверьте все соединения еще раз. Однако, если TSOP адекватно реагирует на сигнал от пульта дистанционного управления, ИК-светодиод горит, а датчик по-прежнему не работает, это признак того, что NE555 генерирует сигнал с частотой, отличной от требуемых 36 кГц. Тогда что? Велика вероятность, что при сборке вы использовали некачественный элемент — замените его.
Сервопривод на NE555
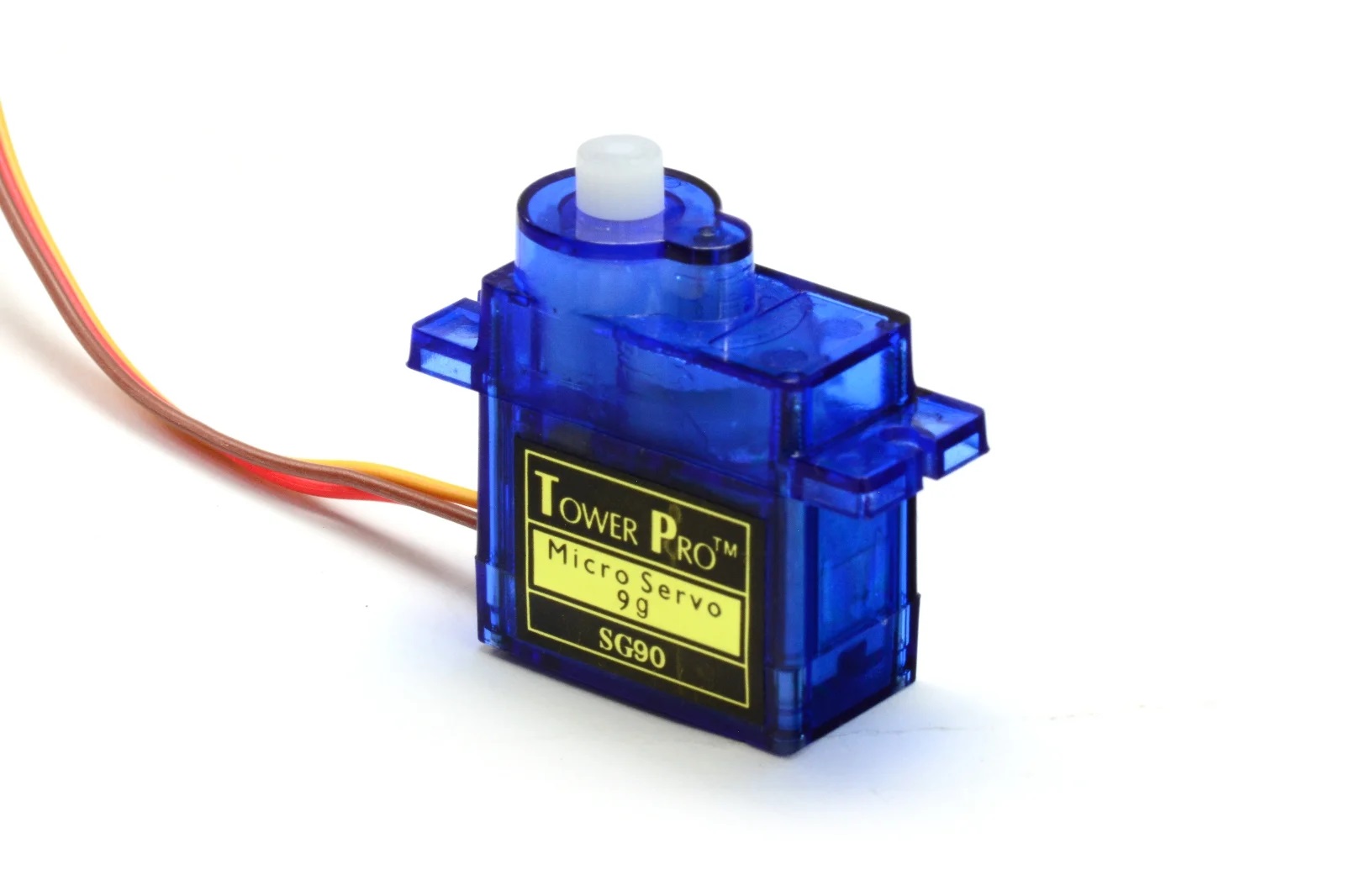
Как мы уже упоминали при обсуждении сигнала ШИМ, сервопривод имеет схему, которая включает двигатель постоянного тока и регулирует скорость данного двигателя. Из корпуса сервопривода выступает ось, которая чаще всего может вращаться только на определенный угол (обычно около 180 °).
Сервопривод — относительно хрупкое электронное механическое устройство, поэтому не следует поворачивать его ось вручную. Если ось повернуть неправильно, то ее можно легко повредить (например, сломав шестерни внутри сервопривода).
Сервоприводы оснащены разъемами с тремя проводами:
- оранжевый (или белый / желтый) — управление,
- красный — плюсовая шина питания (обычно 5-6 В),
- черный или коричневый — масса.
К этим разъемам очень легко подключить провода, которые мы используем для сборки схем на макетных платах. Нет необходимости покупать специальные разъемы или отрезать оригинальный штекер.
Напоминаем: вращение сервопривода контролируется изменением ширины импульсов, которые ему циклически посылаются — но, мы уже говорим о ШИМ! Импульсы положительного напряжения повторяются примерно каждые 20 мс. Ширина импульса составляет примерно 1-2 мс.
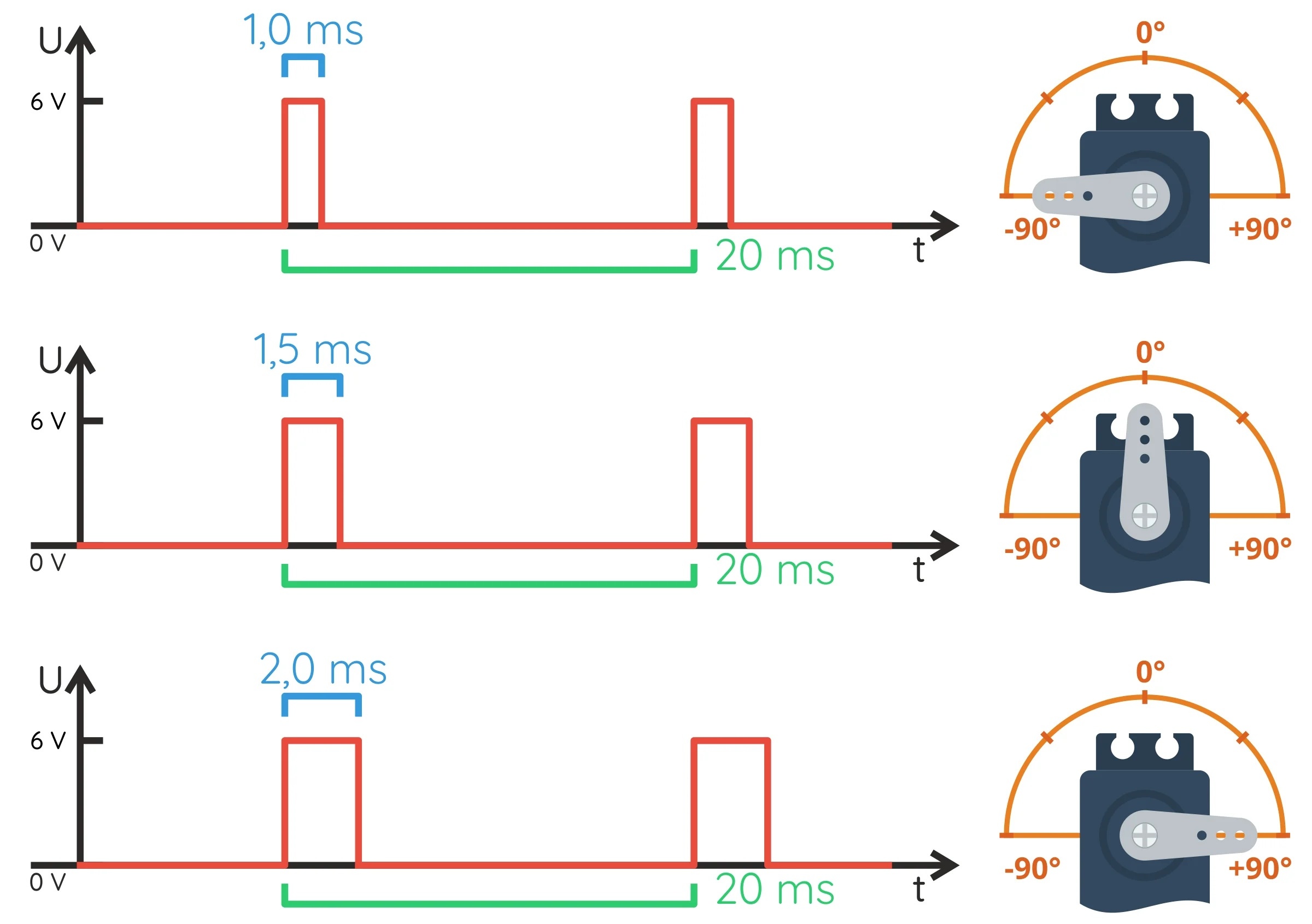
Чтобы установить сервопривод в среднее положение, подайте ему сигнал шириной около 1,5 мс, и его удлинение или сокращение заставит ось поворачиваться.
Принципиальная схема сервопривода на NE555
Эта схема также основана на NE555, но его типичное применение было изменено. В типичной нестабильной конфигурации сумма сопротивлений R1 + R2 отвечает за продолжительность высокого состояния, и только R2 является низким состоянием. При изменении высокого состояния мы также меняем время низкого состояния. Это определенное неудобство, когда низкий статус всегда должен быть одинаковым.
При добавлении одного диода 1N4148, роли этих резисторов разделяются: зарядный ток конденсатора C2 протекает через R1 и диод D1. Диод открывается, потому что сопротивление резистора R2 намного больше, чем R1 (на него будет подаваться большее напряжение). После того, как внутренний транзистор вывода 7 будет закорочен на массу, диод закроется и C2 разрядится только через R2.
Элементы, необходимые для выполнения данной сборки схемы:
- 1 × сервопривод,
- 1 × микросхема NE555,
- Резистор 1 × 56 кОм,
- Резистор 1 × 1 кОм,
- Потенциометр 1 × 5 кОм,
- 1 × 1000 мкФ конденсатор,
- 1 × 220 мкФ конденсатор,
- Конденсатор 3 × 100 нФ,
- 1 × 470 нФ конденсатор,
- 1 × 1N4148 диод,
- Батарея 4 × AA,
- 1 × блок для 4 батареек АА,
- 1 × макетная плата,
- Комплект соединительных проводов.
Принципиальная схема выглядит следующим образом:
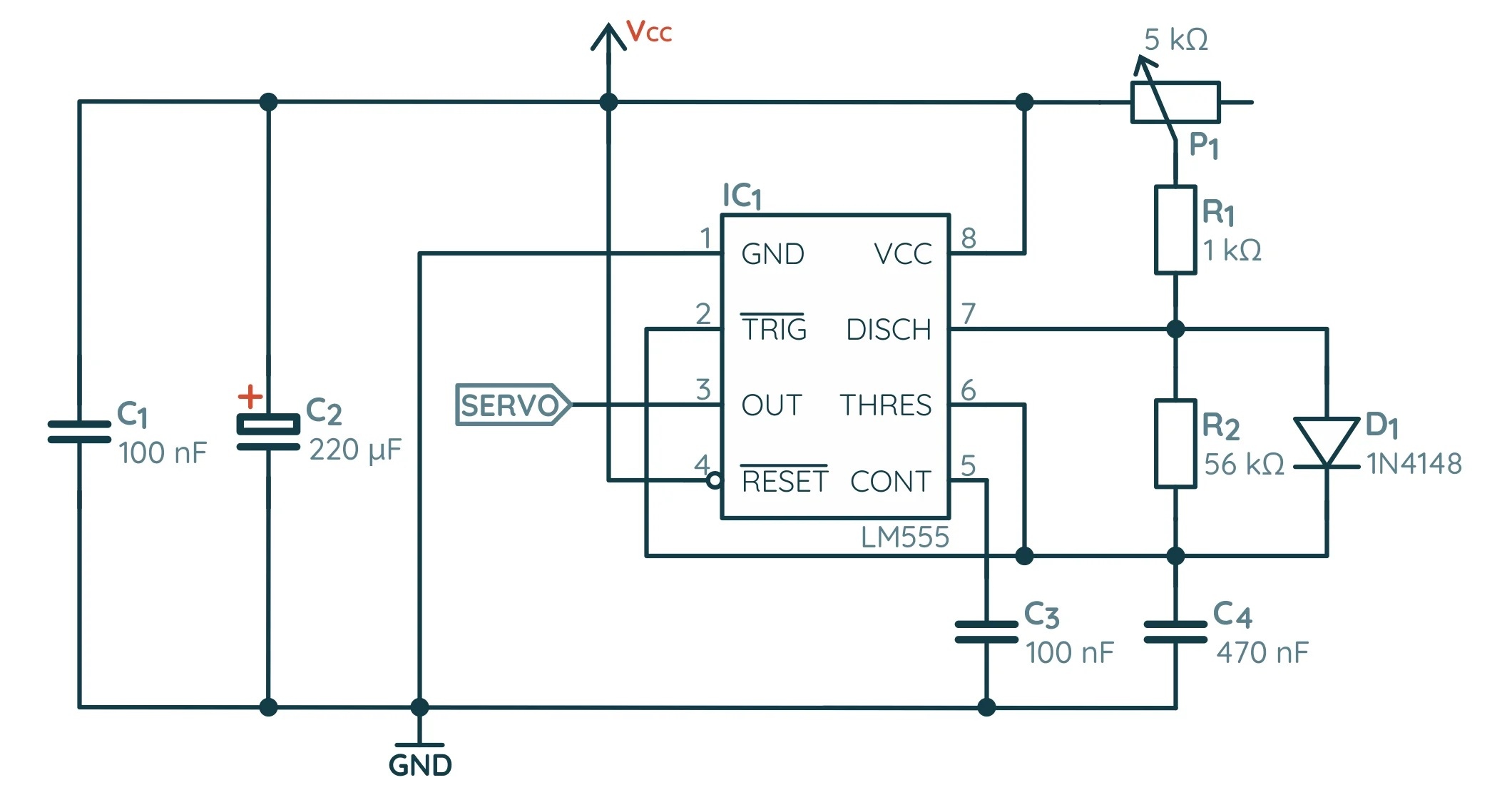
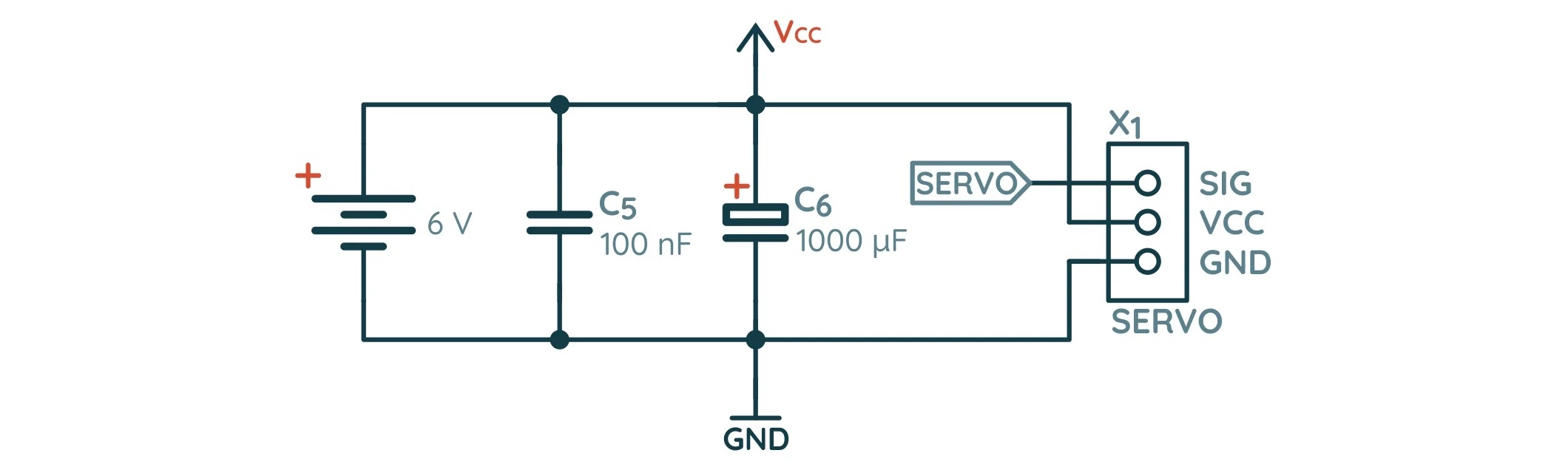
Как и раньше — здесь мы также разделили схему на два отдельных блока. На этот раз второй блок очень простой (он только подключает сервопривод к источнику питания и к сигналу, описываемому как SERVO, то есть к третьему выводу NE555.
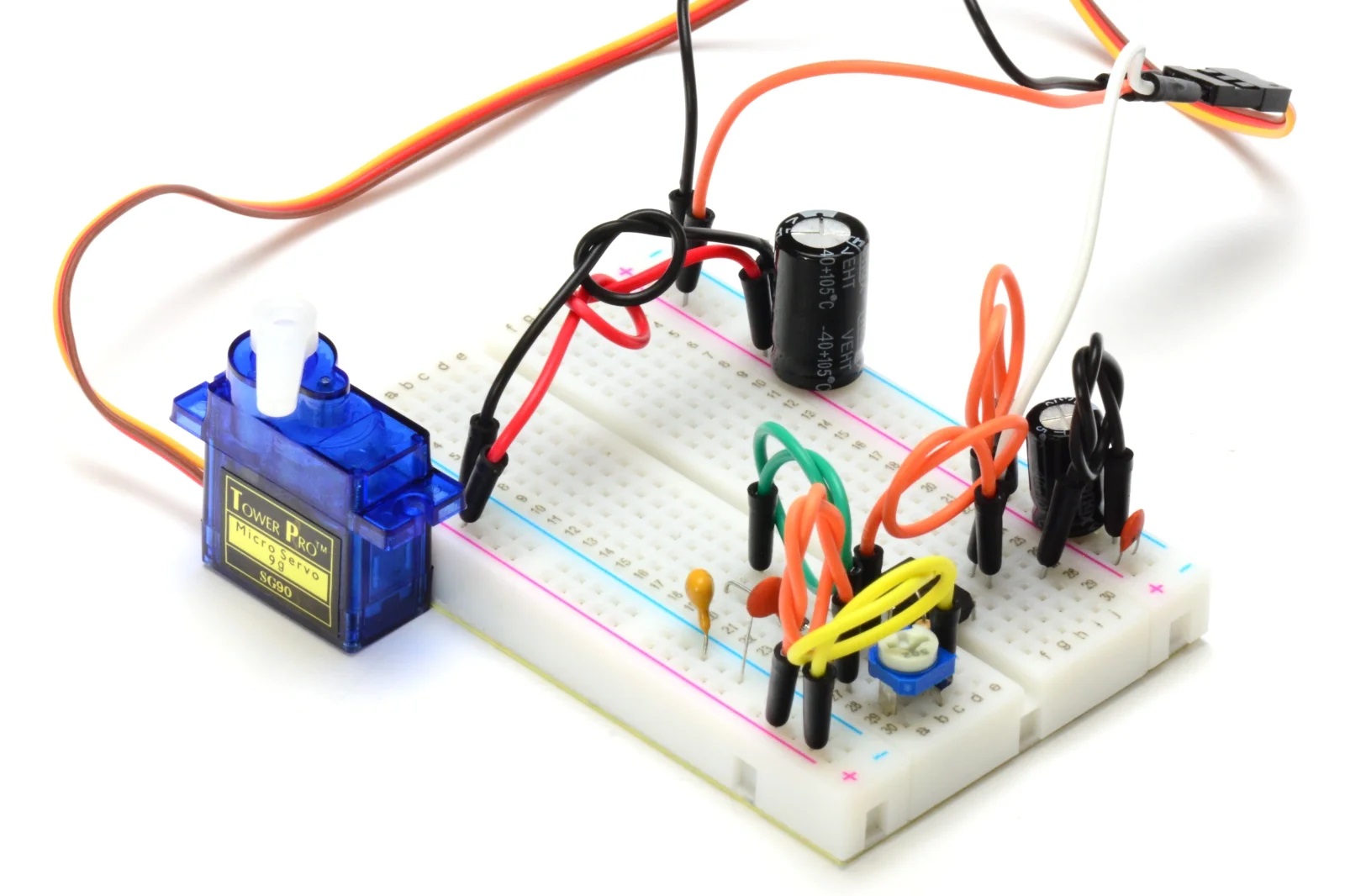
Вот примерная реализация схемы на макетной плате, а ниже, как и раньше, вы можете найти подробную пошаговую инструкцию.
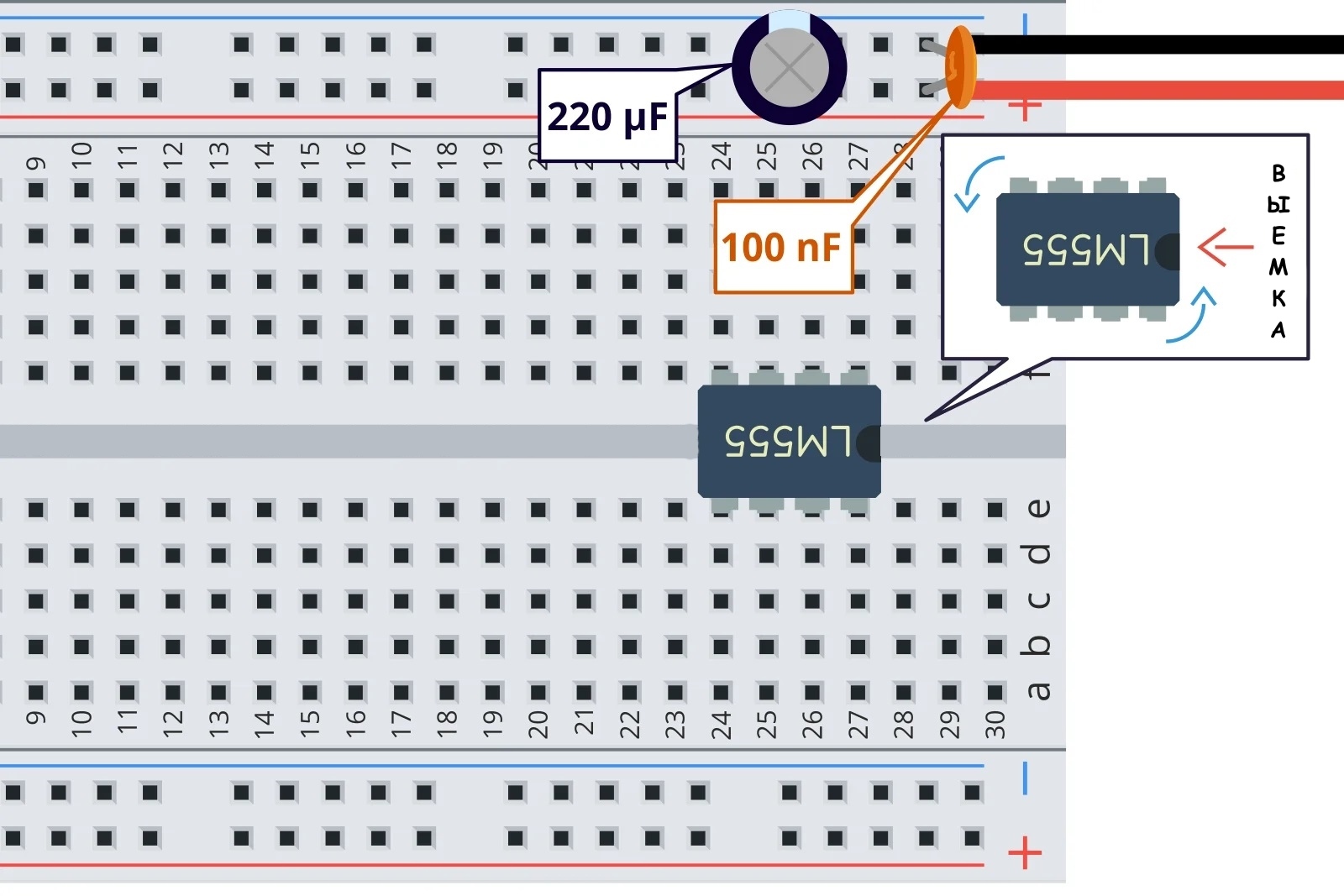
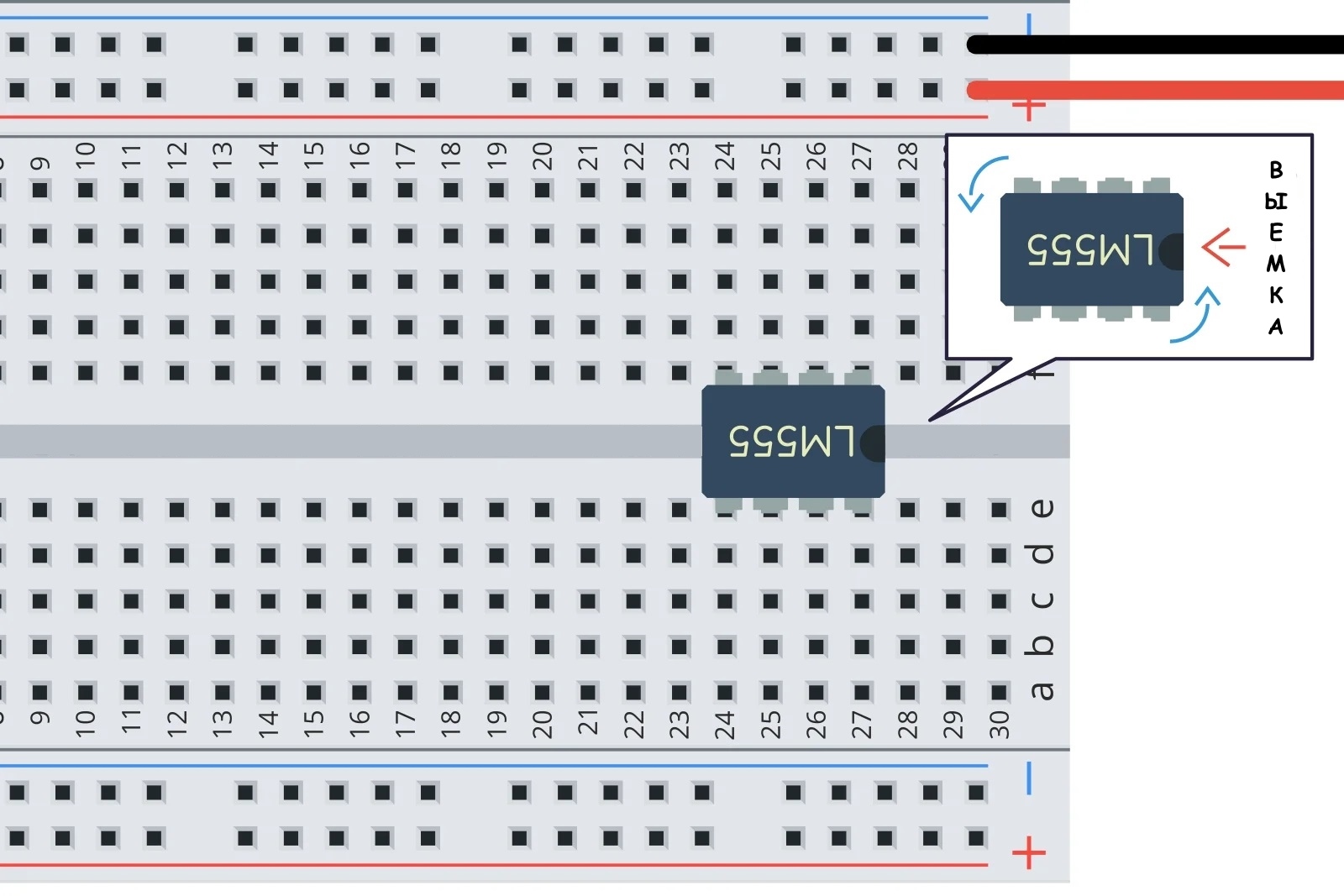
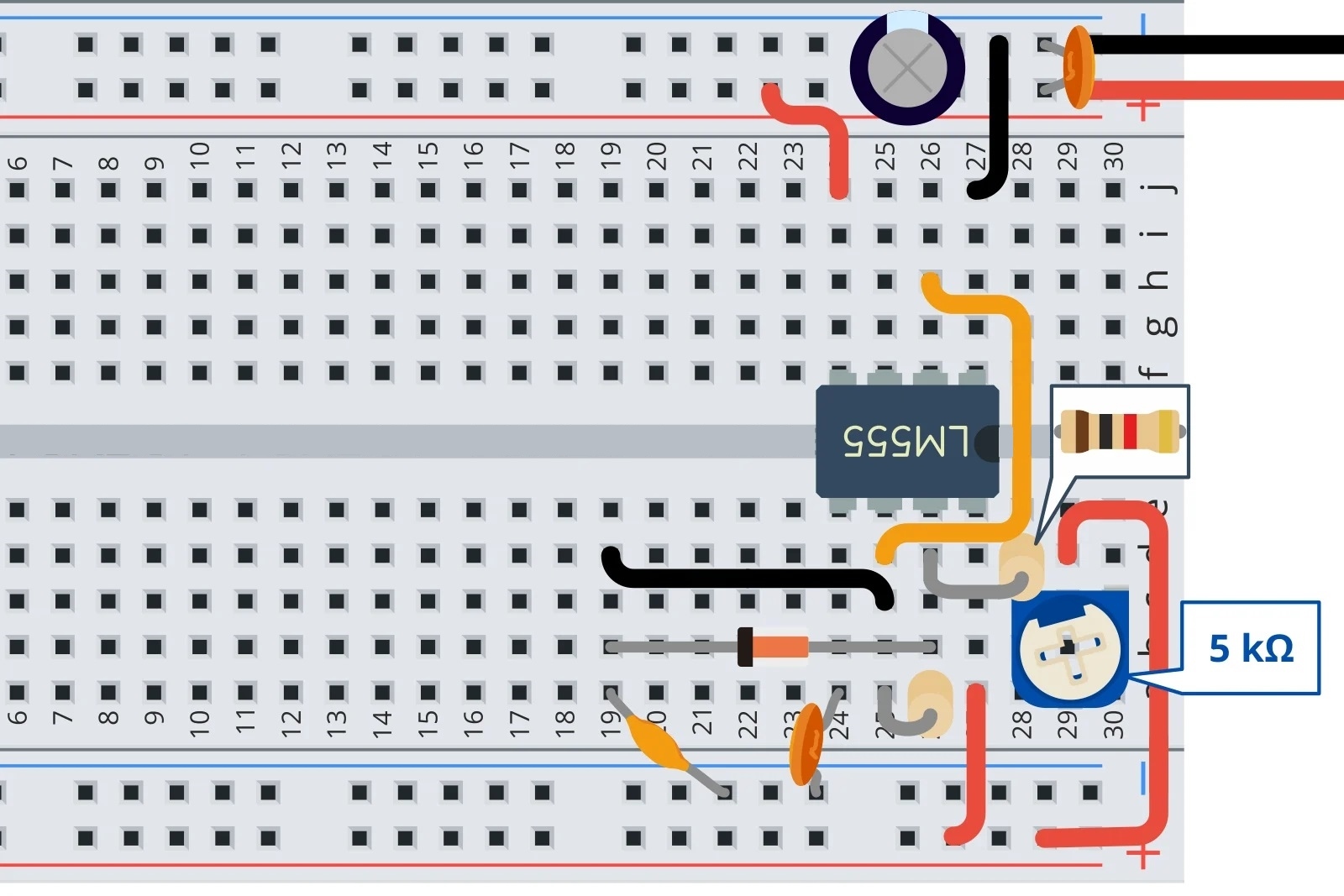
Шаг 1. Расположите правильно на плате NE555 (обращая внимание на углубление).
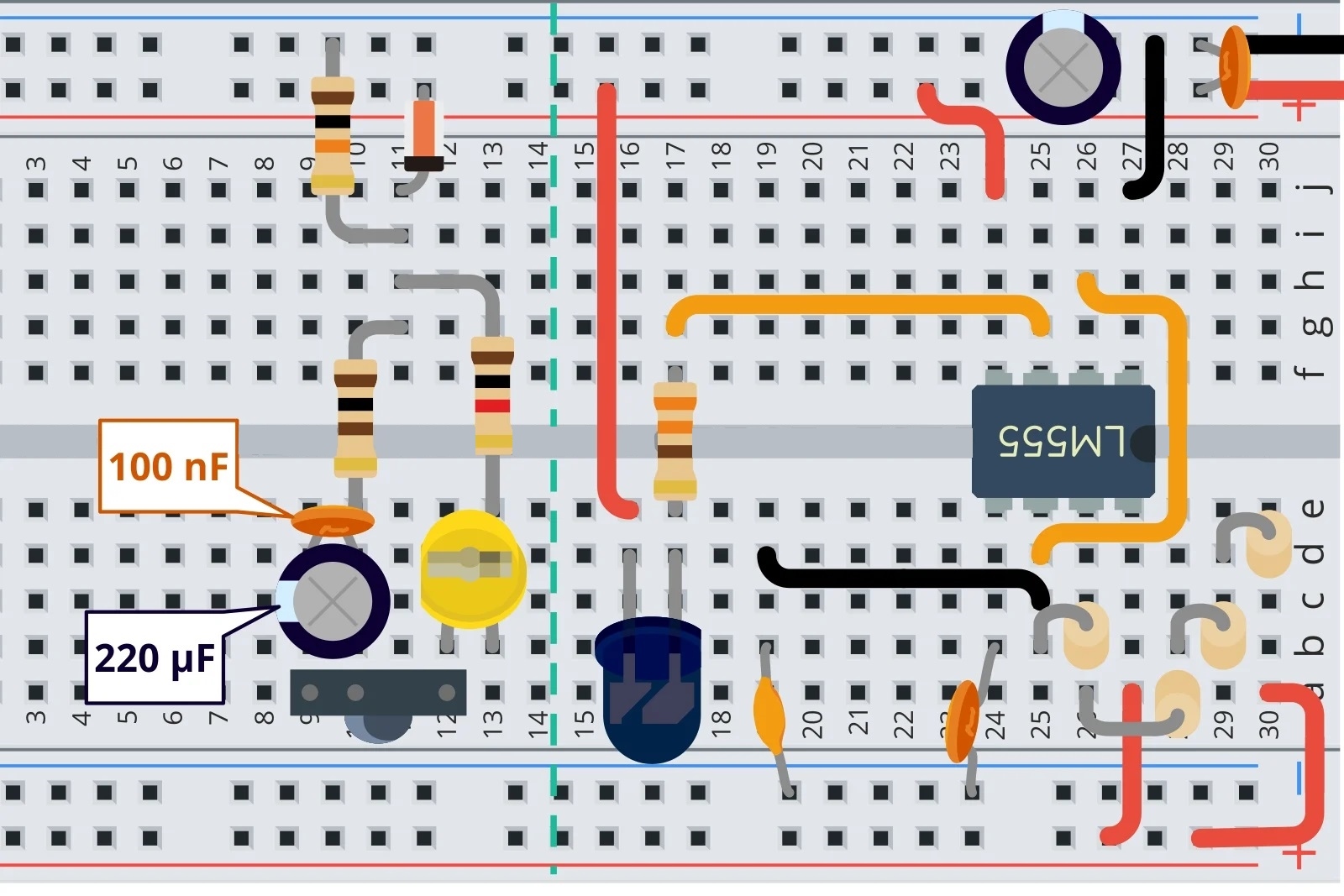
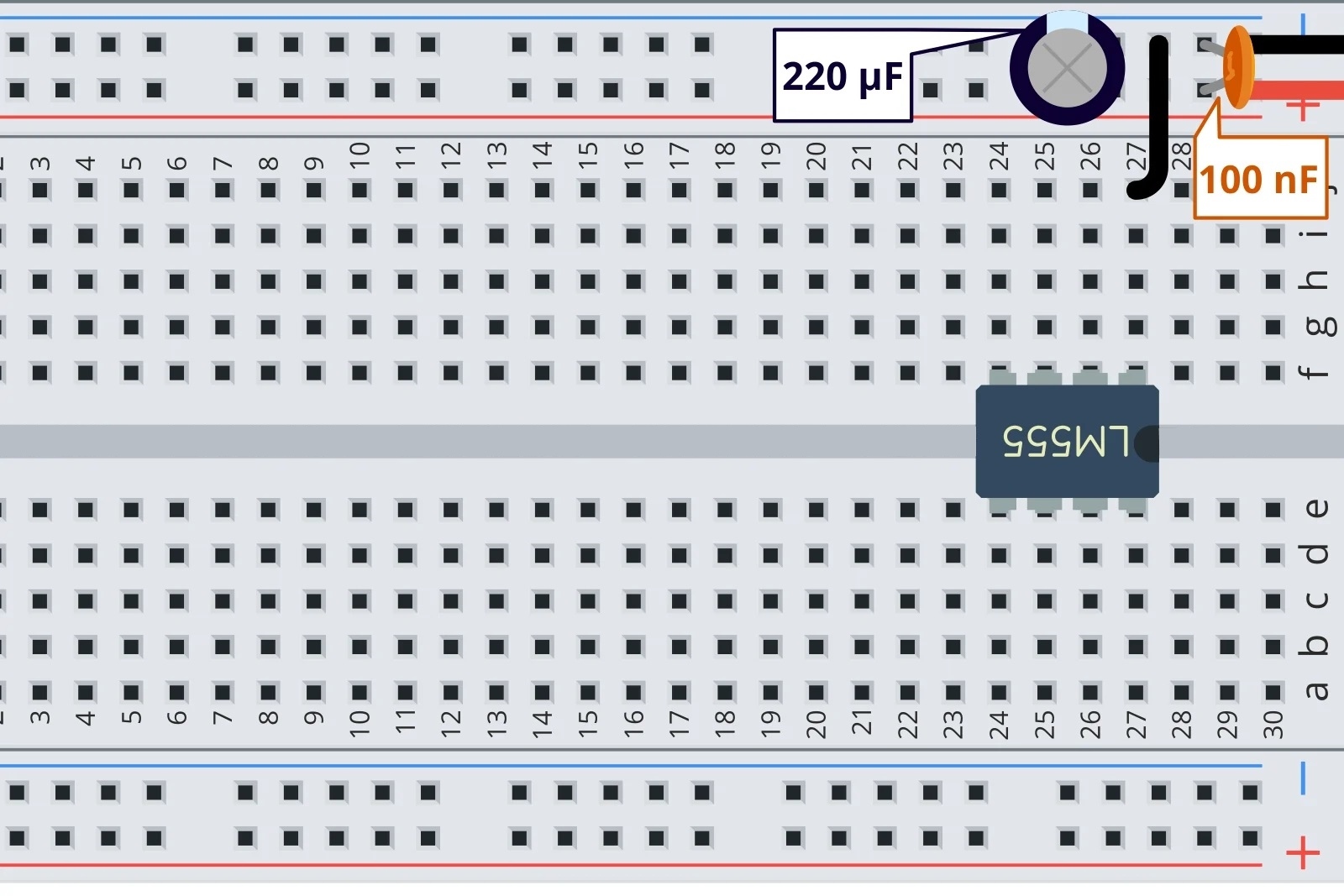
Шаг 2. Ставим конденсаторы С1 (100 нФ) и С2 (220 мкФ). Подключаем первый вывод NE555 к земле.
 |
 |
| Шаг 1: Подключение к NE555 | Шаг 2: Соединения с NE555 |
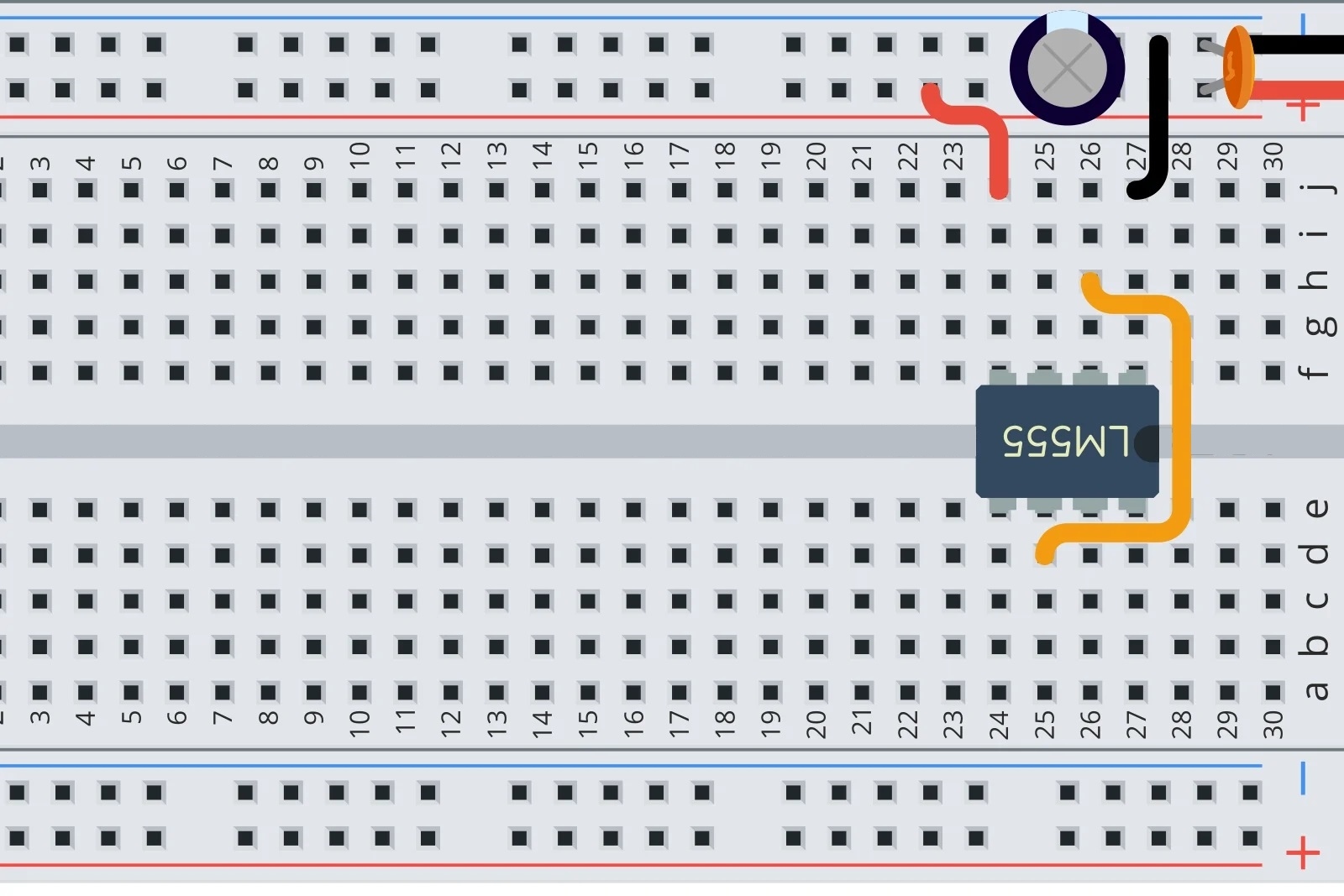
Шаг 3. Соединяем второц вывод схемы с шестой, а четвертую — с плюсовой шиной питания.
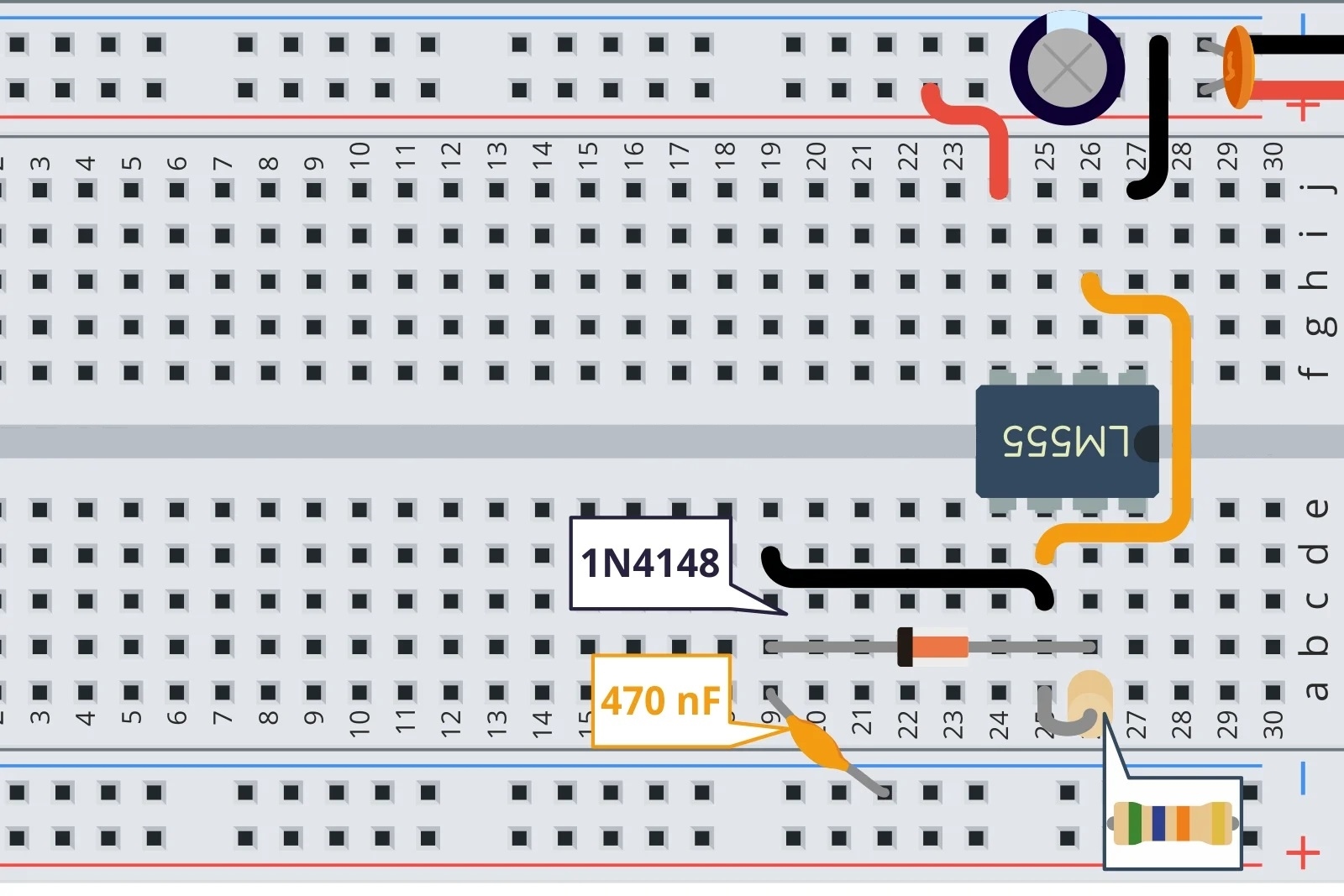
Шаг 4. Собираем элементы возле ножки №6. Конкретно это конденсатор С4 емкостью 470 нФ. Дополнительно там видны резистор R2 (56 кОм) и диод 1N4148.
| Обязательно обратите внимание на направление проводимости диода! |
 |
 |
| Шаг 3: Подключите C4, R2 и диод 1N4148 | Шаг 4: Подключите резистор и потенциометр |
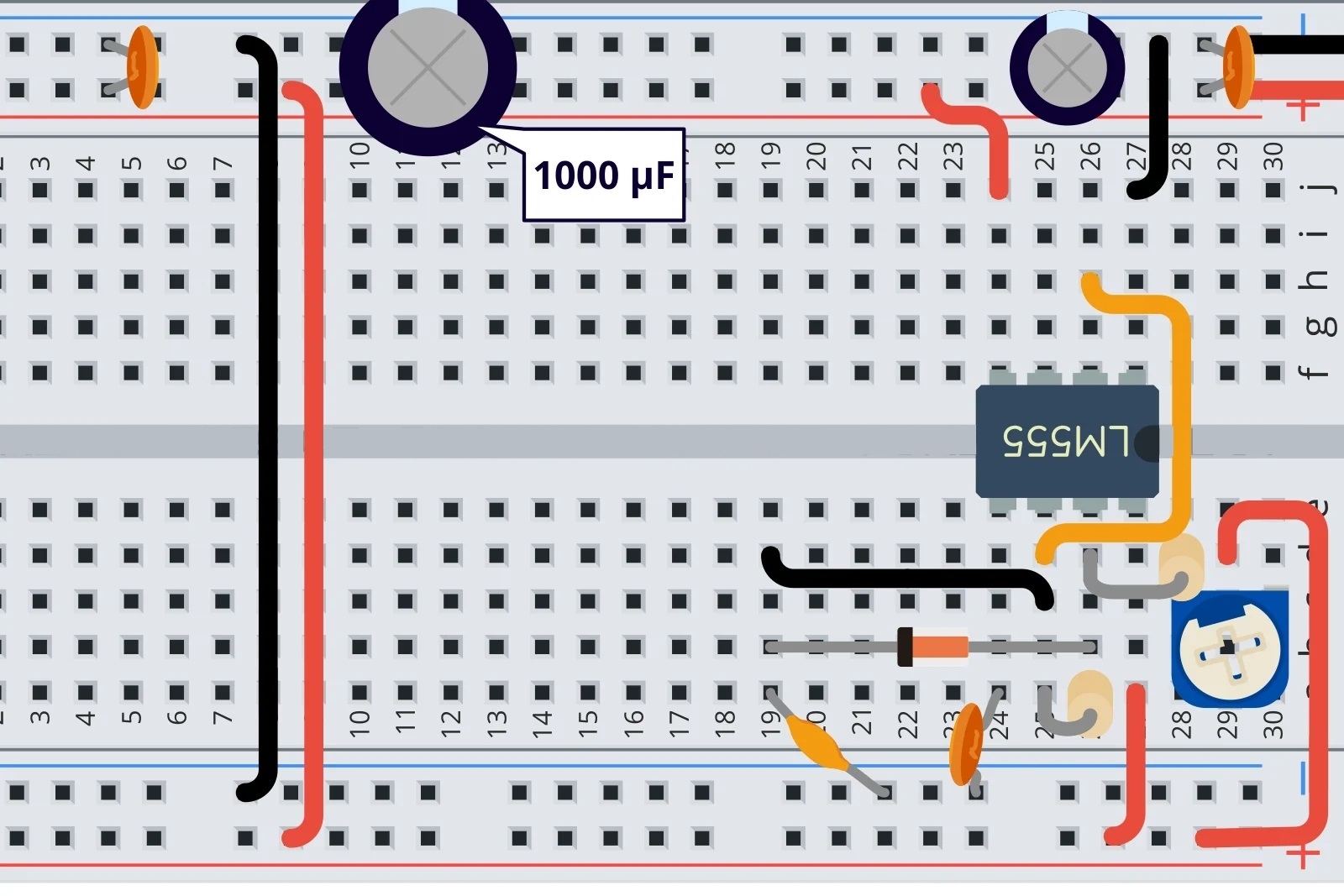
Шаг 5. Подсоедините ножку №8 к положительной шине питания. Подключаем резистор R1 (1 кОм) и затем подключаем к нему потенциометр. Мы хотим получить регулируемый резистор, поэтому используем средний вывод и один из крайних выводов (любой). Подключаем средний вывод к плюсовой шине питания. Добавляем конденсатор С3, подключив пятый вывод NE555 к земле.
Шаг 6. Подключаем линии питания, которые находятся с одной и другой стороны платы. Добавляем конденсаторы С5 (100 нФ) и С6 (1000 мкФ). Они стабилизируют питание схемы, когда двигатель потребляет больше тока.
 |
 |
| Шаг 5: Последующие подключения | Шаг 6: Подключение сервопривода и конденсаторов |
В конце правильно подключаем сервопривод — для этого используем 3 провода:
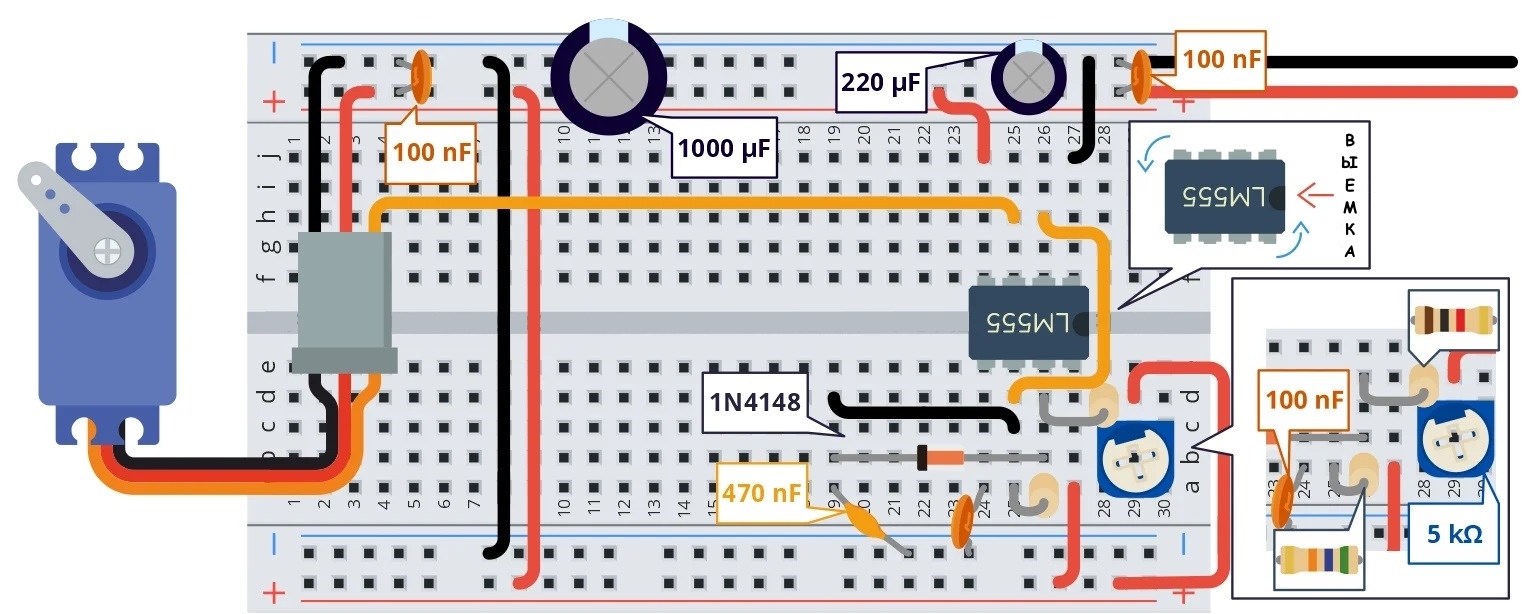
После подключения сервопривода, мы можем подключить источник питания (6 В) и протестировать схему. Каждое изменение настройки потенциометра должно приводить к изменению положения сервопривода. Все благодаря тому, что изменение сопротивления потенциометра изменяет рабочий цикл сигнала ШИМ.
Возможная неровная работа сервооси можно объяснить колебаниями напряжения питания. Такие падения напряжения возникают на контактах макетной платы при запуске сервопривода. Дополнительный конденсатор смягчит этот эффект, но не устранит его полностью. Любые более сильные вибрации (особенно в крайних положениях) также являются результатом работы сервопривода.
Расчет элементов в схеме
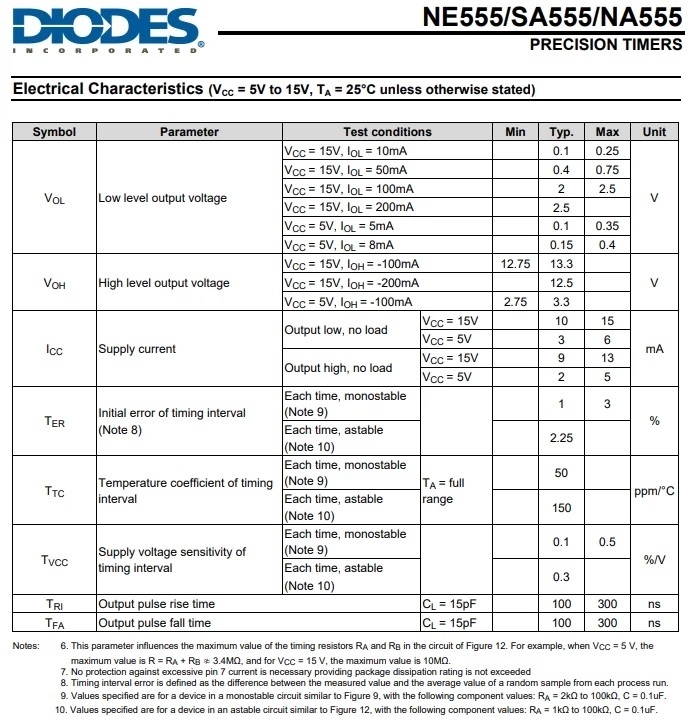
Для эффективного использования NE555 необходимо рассчитать значения ключевых элементов — соответствующие формулы приведены в каталожной заметке. Наиболее важные из них описаны ниже. В сети также есть множество онлайн-калькуляторов, которые помогают с такими расчетами. Однако стоит знать, откуда взялись результаты.
Для моностабильной конфигурации
Время импульса можно рассчитать по одной простой формуле:
Время импульса = ln (3) R C
Где:
- R — величина сопротивления резистора,
- C — емкость конденсатора (в фарадах),
- для Ln (3) мы подставим значение логарифма, то есть ~ 1,1.
Для нестабильной конфигурации
В этом расположении значения элементов зависят от времени высокого и низкого уровня, которое мы хотим получить. Расчеты довольно простые:
Высокий = ln (2) · ( Ra + Rb ) · C Низкий = ln (2) · Rb · C
Где:
- Ra — величина сопротивления резистора Ra,
- Rb — величина сопротивления резистора Rb,
- C — емкость конденсатора (в фарадах),
- для Ln (2) , мы подставим значение логарифма, т.е. ~ 0,693.
Соответствующее преобразование формул позволяет рассчитать значения элементов, которые помогут нам достичь ожидаемых параметров сигнала.
Следите за расчетами!
Интегральные схемы состоят из транзисторов, у которых есть свои ограничения. Следовательно, правильная работа NE555 возможна не при всех условиях. В документации содержится информация о допустимом диапазоне значений некоторых элементов.
Сумма сопротивлений Ra и Rb
Например, в документации можно прочитать, что для нестабильной работы сумма сопротивлений Ra и Rb не должна превышать 10 МОм при питании 15 В или 3,4 МОм при питании 5 В. Также не рекомендуется ставить меньше 1 кОм, потому что при протекании через разрядный транзистор ток станет значительным.
| Те же критерии могут быть приняты для моностабильной системы с одним резистором. |
Емкость конденсатора
Дополнительное ограничение распространяется также на конденсатор для измерения времени: его емкость должна быть больше 1 нФ . В противном случае внутренние возможности этой схемы вызовут заметное удлинение измеряемого времени.
Помимо знания этих правил, вы должны руководствоваться здравым смыслом. Обычно устанавливается одно значение (например, емкость конденсатора) и резисторы подбираются с учетом требуемых временных зависимостей. Вы должны помнить, что нет ничего идеального, и схема, состоящая из элементов с рассчитанными значениями, может иметь временные параметры, отличные от рассчитанных нами.
| Поэтому стоит иметь возможность регулировать сопротивление, например, с помощью потенциометра. |
Вывод
Вот мы и собрали два интересных проекта, благодаря которым, узнали о практическом применении микросхемы NE555. Во времена высокой популярности микроконтроллеров важность этой схемы немного уменьшилась, но ее все еще можно использовать для простых задач. Особенно полезен последний проект про подключение и работу сервопривода.
В следующей статье мы вернемся к теме транзисторов. Мы будем иметь дело с полевыми МОП-транзисторами, которые управляются напряжением, а не током (как в случае с биполярными транзисторами). Эти элементы будут полезны везде, где есть необходимость контролировать протекание сильного тока.
С Уважением, МониторБанк